format WinWord

1
1
1. ASPECTS MATERIELS
1.1 Unités périphériques
1.1.1 Hiérarchie des Mémoires
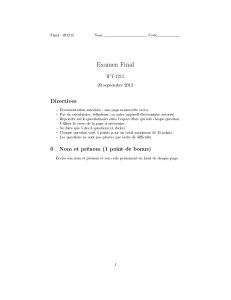
Les différents éléments de la mémoire d'un ordinateur sont
ordonnés en fonction des critères suivants: Temps d'accès
Capacité et coût par bit
Quand on s'éloigne du CPU vers les mémoires auxiliaires, on
constate que le temps d'accès et la capacité des mémoires
augmentent, mais le coût par bit diminue.
- les éléments de mémoires situés dans l'unité
centrale de traitement (CPU) sont les registres
qui sont caractérisés par une grande vitesse et
servent principalement au stockage des opérandes
et des résultats intermédiaires
- L'antémémoire ou mémoire cache est une mémoire
rapide de faible capacité (par rapport à la
mémoire centrale) utilisée comme mémoire tampon
entre le CPU et la mémoire centrale. cette mémoire
permet au CPU de faire moins d'accès à la mémoire
centrale et ainsi de gagner du temps.
- La mémoire centrale est l'organe principal de
rangement des informations utilisées par le CPU.
pour exécuter un programme, il faut le charger en
mémoire centrale (instructions + données). cette
mémoire est une mémoire à semi-conducteur, mais
son temps d'accès est beaucoup plus grand que
celui des registres et du cache.
- La mémoire d'appui sert de mémoire intermédiaire
entre la mémoire centrale et les mémoires
auxiliaires. Elle est présente dans les
ordinateurs les plus évolués et permet d'augmenter
la vitesse d'échange des informations entre des 2
niveaux.
- les mémoires auxiliaires, appelés aussi mémoires
de masse (dont les mémoires d'archivage), sont des
mémoires périphériques de grande capacité et de
coût relativement faible. elles servent d'éléments
de stockage permanent et utilisent pour cela des
supports magnétiques (disque, cartouches, bandes),
et des supports optiques (disques optiques),
tandis que les niveaux les plus proches du

2
2
processeur central font appel à la technologie des
semi-conducteurs
1.1.2 Disques Magnétiques
Les disques sont des mémoires vives non volatiles.
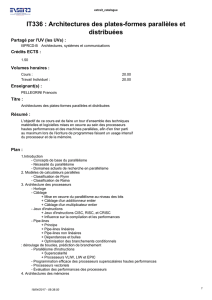
Une unité de disques magnétiques est constitué d'un empilement de
plusieurs disques dont les 2 surfaces sont recouvertes d'une
couche magnétisable.
Les disques tournent autour d'un axe central avec une vitesse de
plusieurs milliers de tours par minute. Entre les disques se
trouvent les têtes de lecture/écriture.
La surface de chaque disque sont structurées en pistes et en
secteurs.
Les pistes sont des cercles concentriques, il y a en a plusieurs
centaines par surface.
Elles sont divisées en secteurs (de 10 à 100 par pistes) et
chaque secteur contient un certain nombre d'octets. l'ensemble
des pistes ayant un rayon donné forme un cylindre.
Les pistes d'un cylindre ont la particularité de pouvoir être
lues ou écrites sans déplacer les têtes. un disque neuf n'est pas
structuré en pistes et secteurs, il faut le formater c'est à dire
effectuer ces subdivisions.
L'accès aux informations d'un disque est un accès semi -
séquentiel. Il faut indiquer le cylindre auquel on désire
accéder, ce qui est fait directement par positionnement de
l'ensemble rigide des têtes de lecture/écriture et ensuite il
faut attendre que le bon secteur vienne sous la tête, ce qui
prend en moyenne une demi - rotation. Pour obtenir un bloc de
données, il faut spécifier l'unité de disque, le cylindre, la
surface (surface + cylindre = piste), et le secteur;
de plus il faut spécifier le nombre d'informations à transférer
et l'adresse en mémoire centrale où on doit effectuer le
transfert. Donc, pour transférer des informations, trois temps
sont à considérer :
- temps de positionnement des têtes sur le bon
cylindre
- temps d'attente, dû à la rotation du disque pour
atteindre le bon secteur
- temps de transfert des informations.
L'information est enregistrée en série sur les pistes
concentriques. Les pistes contiennent toutes le même nombre de
bits, la densité varie donc en fonction de la piste. La densité
atteint son maximum sur la piste la plus proche de l'axe central;
Les pistes sont divisées en secteurs et chaque secteur est séparé
du suivant par une petite zone non utilisée qui permet de repérer
les secteurs et de les synchroniser.

3
3
Les disques utilisent des têtes ultra - légères très proches de
la surface du disque.
L’altitude de vol des têtes (distance entre le disque et la tête
de lecture/écriture) est inférieure à 0,25 microns.
La moindre particule de poussière a une taille 10 fois plus
grande. C'est pourquoi les disques durs sont placés dans des
boîtiers hermétiques. Ces disques sont appelés disque durs et
sont fixes dans leur unité. Dans les formats les plus courants
3"1/2 ou 5"1/4, les disques ont une capacité pouvant atteindre
plusieurs gigabytes.
Les Disquettes (floppy disks) sont principalement utilisées dans
les systèmes tels que les micro-ordinateurs. elles sont
constituées d'un petit disque en matière plastique souple
recouvert d'une couche magnétisable et conservé dans une pochette
d'où il ne sort jamais.Le principe de fonctionnement est le même
que celui des disques durs.
Une nouvelle technologie des lecteurs floptiques permet de
stocker 21 mégabytes de données sur des disquettes 3"1/2. Cette
augmentation de capacité est obtenue par l'ajout d'un capteur
optique (laser) aux têtes magnétiques de lecteur/écriture qui ont
elles-mêmes gagnées en finesse. Le capteur détecte un élément de
positionnement optique placé sur une piste optique du disque, ce
qui augmente considérablement la précision de positionnement des
têtes de lecture/écriture.
1.1.3. Bandes Magnétiques
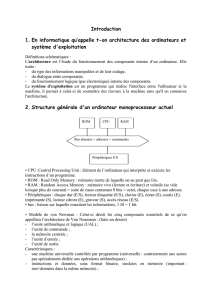
Les bandes et cartouches magnétiques sont semblables à celles
utilisées pour l'enregistrement de la musique. Elles sont
constituées d'un ruban souple servant de support à une couche
magnétisable, enroulé d'un support plastique.
caractéristiques:
* la longueur est généralement de 2400 pieds (+/-
732 m)
* la largeur d'1/2 pouce (+/- 1,27 cm)
* la bande est divisée en pistes dont le nombre est
de 7 ou 9 (la valeur 9 étant la valeur standard)
* le byte est enregistré transversalement, càd 8
bits sont répartis sur 8 pistes, la neuvième étant
utilisée pour un bit de parité
* la densité longitudinale a évolué en 25 ans de 200
à 6500 bpi
* les modes d'enregistrement utilisés sont les modes
NRZI, PE et GCR
* Le temps de lecture d'une bande est de quelques
minutes, ce sont les supports de données
relativement lents.

4
4
Les bandes/cartouches, montées sur les unités de
lecture/écriture, sont des mémoires auxiliaires, non volatiles et
à accès séquentiel.
Elles ont les avantages suivants:
* unités qui sont des périphériques standard
disponible dans la plupart des petits ou des
grands systèmes, ce qui permet l'échange de
bandes/cartouches entre systèmes.
* la méthode d'enregistrement est une méthode
très économique (1milliard de bits équivaut à
+/- 1$)
* les données peuvent être conservées sans
problèmes au moins pendant une vingtaine
d'années ( bon moyen d'archivage).
Elles ont aussi des inconvénients:
* l'accès séquentiel --> d'où une certaine lenteur
* La nécessité d'intervention d'un opérateur pour le
montage ou la démontage de la bande ou de la
cartouche dans le lecteur.
Organisation des données:
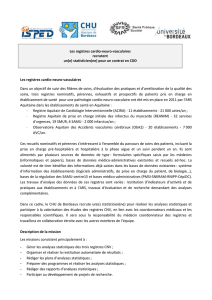
exemple d'enregistrement avec la méthode CGR:
Les informations que l'on désire stocker sont déposées dans une
mémoire tampon par groupe de 7 caractères de 8 bits + 1 bit de
parité, auxquels on ajoute un 8ième caractère de contrôle.
On divise ces 8 caractères en 2 groupes de 4. Dans chaque groupe
on obtient 9 colonnes de 4 bits que l'on code avec la table de
codage de la méthode du GCR. on enregistre ainsi des groupes de 5
bits le long de chaque piste.
Le travail de codage - décodage, contrôle, synchronisation est
transparent à l'utilisateur. il est effectué au niveau de l'unité
de bande et de son contrôleur.
Les fichiers sont composés d'enregistrement logiques
qui eux-mêmes sont composés d'un ensemble de caractères.
Sur la bande chaque enregistrement logique correspond à un bloc
physique.
Les blocs sont terminés par des bits de contrôle, appelés
Cheksum, et sont séparés par des petites zones non magnétisées
appelés Gaps. Les fichiers sont séparés par une marque de fin de
fichier.
Les cartouches ou cassettes magnétiques ( cartridges) suivent le
même principe que les bandes magnétiques, mais le format est
réduit et leur manipulation plus aisée.

5
5
1.1.4 Autres unités périphériques
1.1.4.1 DISQUES OPTIQUES
Les disques optiques numériques sont la révélation de ces
dernières années:
Ils offrent de grandes capacité de stockage sur des supports
amovibles.
Ils sont d'une très grande fiabilité;
L'inconvénient majeur est la relative lenteur de ces systèmes.
Les mémoires magnétiques présentent un certain nombre
d'inconvénient comme la sensibilité aux poussières, aux rayures,
à la température et aux champs magnétiques.
L'optique permet d'éviter ces problèmes et offre des densités
d'informations au moins 10 fois plus grandes que celles des
mémoires magnétiques, pouvant atteindre des dizaines de Mbits /
cm².
CD-ROM
sont des compacts disques enregistrés définitivement à l'usine.
Les disques compacts ont une capacité d'environ 650 Mbytes pour
un coût très bas.
On peut aussi regarder ces images sur un ordinateur ou un poste
de TV. Les Cd s'imposent donc comme le support multimédia grand
public.
L'information est stockée le long d'une spirale de microcuvettes
disposées à la surface du disque, celle-ci est revêtue d'une
couche réflective, l'ensemble étant enserré dans une couche
protectrice de résine. Lors de la lecture, on mesure la quantité
de lumière réfléchie pour reconnaître les bits 0 ou à 1.
Une cuvette diffracte la lumière et donc ne réfléchit qu'une
faible partie alors qu'en l'absence de cuvette, la lumière est
réfléchie en grande partie
les disques WORM (Write Once Read Many)
que l'on peut écrire une fois et lire autant que l'on désire, ont
constitué la première génération des médias d'archivage.
Les disques optiques utilisent un rayon laser pour la lecture et
l'écriture des données.
L'écriture est réalisée à l'aide d'un puissant faisceau laser en
creusant des petits trous ou des cuvettes dans la surface
métallique ultra - mince d'un disque en plastique. Ces
microcuvettes ont un diamètre d'environ 0,6 µm
La lecture est réalisé avec un laser moins puissant qui se
contente de détecter la présence ou l'absence des trous en des
endroits précis. Si un trou existe, la lumière émise par le rayon
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
1
/
35
100%