Corrigé UE515 main

L3 GEEA - OH Janvier 2009 – 2h
3 pages
Outils pour l’Ingénieur - CORRIGE - P. SIGNORET
Etude de l’œil en optique paraxiale
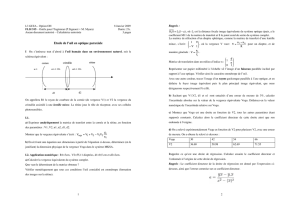
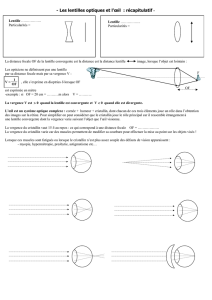
I On s’intéresse tout d’abord à l’œil humain dans un environnement naturel, soit le schéma
équivalent :
n1=1.336
cornée
cristallin
n=1
n2=1.336
rétine
d1
d2
On appellera R1 le rayon de courbure de la cornée (de vergence V1) et V2 la vergence du
cristallin assimilé à une lentille mince.
I.1. Exprimer analytiquement la matrice de transfert entre la cornée et la rétine, en fonction
des paramètres : V1, V2, n1, n2, d1, d2.
a)
1n1d
2V1Vequ
)
1n1d
2V1(
2n2d
1n1d
Vequ
2n2d
1n1d
1V1
...
11V
01
10 1n1d
1
12V
01
10 2n2d
1
M
avec
1n1d
*2V*1V2V1VVequ
b) cf cours : la vergence s’exprime en dioptries ou
1
m
I.2. Application numérique : R1=3cm, V2=55,11 dioptries, d1=0,5 cm et d2=2cm.
V1=11,2
a) Calculer la vergence équivalente du système complet.
160
127
64
m
64
1
0
Que vaut le déterminant de la matrice obtenue ? 1

Vérifier numériquement que sous ces conditions l’œil considéré est emmétrope :
a=M11=0
iiii FHfSH
=
Vequ
n2
2,08 cm
i
FS
Rappels :
)a1(fSH ii
, où
i
f
est la distance focale image équivalente du système optique épais, a le
coefficient M11 de la matrice de transfert et S le point axial de sortie du système complet.
La matrice de réfraction d’un dioptre sphérique, comme la matrice de transfert d’une lentille
mince, s’écrit :
1V
01
, où la vergence V vaut :
Rnn
Voi
pour un dioptre, et de
manière générale :
i
i
f
n
V
.
Matrice de translation dans un milieu d’indice n :
10 n
d
1
( Représenter sur papier millimétré à l’échelle x2 l’image d’un faisceau parallèle incliné par
rapport à l’axe optique. Vérifier ainsi le caractère emmétrope de l’œil.
Avec une autre couleur, tracer l’image d’un rayon quelconque parallèle à l’axe optique, et en
déduire le foyer image équivalent puis le plan principal image équivalent, que nous
désignerons respectivement Fi et Hi.
cm93,11f1
et
cm42,2f2
)
Nota Bene : Dans tout ce qui suit, on ne demande aucune construction graphique.
b) Sachant que V1, V2, d1 et n1 sont entachés d’une erreur de mesure de 3%, calculer
l’incertitude absolue sur la valeur de la vergence équivalente Vequ. Déduisez-en la valeur
numérique de l’incertitude relative sur Vequ.
1
121
21equ ndVV
VVV
2
1
11211
'
1211
'
2112
'
1
21equ ndndVVndVVdVVdVV
dVdVdV
Hypothèse :
1
1
1
'
1
1
'
11 n
dn
d
d
VVdV
Ainsi :
1
121
21
1
121121121121
21equ ndVV
2VV
ndVVdVVdVVdVV
VVdV

On trouve :
equ
dV
1,85 et
equ
equ
V
dV
2,89 % .
Autre méthode :
1
1
equ
1
1
equ
2
2
equ
1
1
equ
equ dn
n
V
dd
d
V
dV
V
V
dV
V
V
dV
, avec rappel :
1
121
21equ ndVV
VVV
1
2
1
121
1
1
21
2
1
11
1
1
12
equ dn
ndVV
dd
nVV
dV)
ndV
1(dV)
ndV
1(dV
soit
1
2
1
121
1
1
21
2
1
11
1
1
12
equ n
ndVV
d
nVV
V)
ndV
1(V)
ndV
1(dV
1
121
21equ ndVV
2VVdV
… OK
c) Montrer que Vequ est une droite en fonction de V2, tous les autres paramètres étant
supposés constants. Calculer alors le coefficient directeur de cette droite, ainsi que son
ordonnée à l’origine.
Trivial :
1
1
121equ n
d
V1VVV
On trouve alors : a
0,97 et b
8,83 /m
d) On a relevé expérimentalement Vequ en fonction de V2 pour plusieurs V2, avec une erreur
de mesure. On a obtenu :
V2
30
42
54
66
Vequ
36,60
50,98
62,69
71,55
Rappeler ce qu’est une droite de régression. Calculez ensuite le coefficient directeur et
l’ordonnée à l’origine de cette droite de régression, ainsi que l’erreur commise par rapport à
la théorie sur ce coefficient directeur.
Rappels : Le coefficient directeur de la droite de régression est donné par l’expression ci-
dessous :
2
2xx
y.xy.x
a
cf fichier excel joint

II On s’intéresse à présent à l’œil en vision marine, par exemple immergé dans une piscine
(indice de réfraction : 1,33)
II.1. Quels sont les paramètres modifiés ? V1=0.2
II.2. L’eau rend-elle l’œil myope ou hypermétrope ? hypermétrope :
Fi se situe alors après S, puisque maintenant a>0 (a=0,17) et
0f.aSF ii
.
III. Pour corriger cette vision aquatique, on utilise des lunettes de plongée.
III.1. On appelle z la distance entre ces lunettes et la cornée, f leur focale et
l’épaisseur au
centre de ces lunettes.
Sans effectuer de calculs, trouver la configuration la plus simple (distance + focale) qui
permet de corriger la vision aquatique. Lame à faces // (f infinie), distance z qcq
III.2. (Question « Bonus »)
En notant
dc
ba
M
la matrice de transfert établie au I.1, justifier analytiquement le
résultat trouvé intuitivement au III.1, en exprimant la matrice finale en fonction des
coefficients a, b, c, d et de z et
.
Yc
Xa
10 n
1
*
10
z1
*MT
CQFD
-----------------------------------------------
1
/
4
100%