Problèmes rencontrées Coût total du projet

COMMANDE POUR UN MOTEUR PAS À PAS 27/04/06
BIENKOWSKI & BEN ALAYA 1
PROJET D'ATELIER:
COMMANDE POUR UN MOTEUR PAS A PAS
(PHOTO)

COMMANDE POUR UN MOTEUR PAS À PAS 27/04/06
BIENKOWSKI & BEN ALAYA 2
SOMMAIRE:
I- PRESENTATION DU CAHIER DE CHARGE
II- ETUDE THEORIQUE
III- REALISATION PRATIQUE ET MESURES
IV- CONCLUSION
II Etude théorique et dimensionnement des composants 3
Problèmes rencontrées
Coût total du projet
IV Conclusion
24

COMMANDE POUR UN MOTEUR PAS À PAS 27/04/06
BIENKOWSKI & BEN ALAYA 3
I- PRESENTATION DU CAHIER DES CHARGES:
L'objectif de ce projet est de réaliser la commande électronique d'un moteur pas à pas
qui sert à entraîner deux essuies glasses.
La commande conçue actionne un moteur ID31-004 ayant les caractéristiques
suivantes:
Angle
par pas
degrés
Couple
N.cm
Inertie
Rotor
Kg.cm2
Resistance
par phase
ohms
Courant
par phase
A
Nombre de
Connexions
7.5
2.8
0.011
65
0.175
6
Le principe de la commande de ce moteur est le suivant:
Le moteur utilisé est de type unipolaire à 4 phases qui nécessite une alimentation
continue de +12V.
Notre cahier de charge exige les fonctionnalités classiques suivantes:
Balayage unique
Balayage lent
Balayage rapide
Balayage intermittent
Nous verrons plus loin le détail théorique et pratique de chacune de ces fonctions ainsi
que les problèmes rencontrés lors de leur conception.
On s'attardera également sur la partie commande en puissance et sa mise au point.

COMMANDE POUR UN MOTEUR PAS À PAS 27/04/06
BIENKOWSKI & BEN ALAYA 4
II- ETUDE THEORIQUE ET REALISATION:
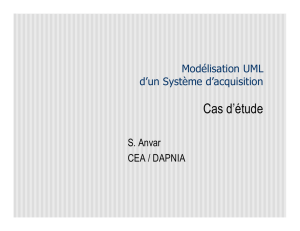
1) Schéma global de la commande
La première plaque "Horloge" comprend le circuit qui génère un signal créneau de
fréquence 12 Hz. Elle comporte aussi 4 interrupteurs pour actionner l'une ou l'autre des
fonctions de la commande ainsi que 2 boutons poussoirs correspondant à la mise sous
tension et la remise à zéro de l'ensemble du FPGA et de la plaque de commande.
Le circuit logique chargé dans le FPGA génère des signaux qui alimenteront selon des
équations bien précises la commande en puissance du moteur. Cette dernière transforme
les niveaux haut et bas des signaux qu'elle reçoit en courants suffisants pour faire tourner
le moteur.
1.1) Horloge:
Notre première tâche était de concevoir une horloge 12 Hz pour le FPGA qui définira la
vitesse de balayage de l'essuie glasses.
En effet, pour effectuer un aller-retour, nous avons besoin de demander 24 pas au
moteur (un aller-retour de 90°). Cela nous donne une vitesse de balayage de 2 secondes
adaptée dans la pratique pour bien voir les différentes phases de fonctionnement.
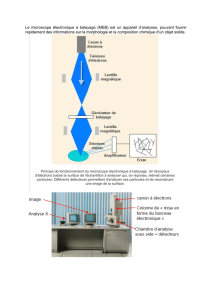
Pour ce faire on a utilisé le composant intégré LM555 en astable:
Connections entre les pattes du LM555 pour avoir un fonctionnement en astable
L'étude théorique du LM555 tel qu'il fonctionne
en astable aboutit aux équations suivantes:
T= 0,693(Ra+2*Rb)*C où T est la période du
signal généré.
f= 1/T = 1,44 / (Ra+2*Rb)*C .
Forme des ondes d'entrée et de sortie de l’astable

COMMANDE POUR UN MOTEUR PAS À PAS 27/04/06
BIENKOWSKI & BEN ALAYA 5
Les valeurs pratiques des composants que nous avons choisis sont alors:
4kOhms pour les deux résistances Ra et Rb,
10 uF pour le condensateur C relié à la patte 6 du LM555
0,01 uF pour le condensateur relié à la patte 5.
Ces valeurs nous permettent d'obtenir un signal carré de période 83 ms càd 12 Hz
mesuré à l'oscilloscope (CF partie pratique)
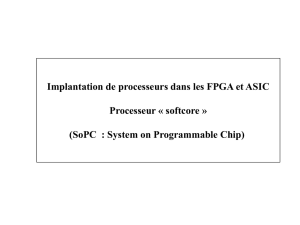
Le schéma de la plaque "Horloge" finalisé est le suivant:
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%