theme bac 2007 - sti electronique GRAY

Baccalauréat STI Génie Electrique Académie de Besançon
Epreuve de construction Session 2007- V1-élèves
Lycée St Paul Besançon STATION DE NETTOYAGE ROBOTISEE Page 1
THEME BAC 2007
STATION DE NETTOYAGE
ROBOTISEE
Sciences Techniques Industrielles
Génie ELECTRONIQUE
BESANCON
MOZZI Yves-Marie
CHARMOILLE Samuel

Baccalauréat STI Génie Electrique Académie de Besançon
Epreuve de construction Session 2007- V1-élèves
Lycée St Paul Besançon STATION DE NETTOYAGE ROBOTISEE Page 2
Sommaire
Système technique « Station de nettoyage robotisée »
1. Mise en situation du système technique P4
1-1 Introduction P4
1-2 Eléments constitutifs du système P5
1-3 Limite du système P6
2. Description fonctionnelle du système technique P7
2.1 Diagramme sagittal du système P7
2.2 Eléments du système pris deux à deux P8
2.3 Approche des milieux associés P9
Objet technique « Robot aspirateur Roomba »
3. Analyse fonctionnelle de l’OT1 « Robot aspirateur » P10
3.1 Fonction d’usage P10
3.2 Etude fonctionnelle de niveau 1 et 2 P10
3.2.1 Fonction globale P10
3.2.2 Schéma fonctionnel de niveau 1 P10
3.2.3 Schéma fonctionnel de niveau 2 de OT1 P11
3.4 Etude fonctionnelle de degré 1 et 2 de la partie commande P12
3.3.1 Schéma fonctionnel de degré 1 de OT1 P12
3.3.2 Définition des fonction principales
FP1, FP2, FP3, FP4, FP5, P13
FP6, FP7, FP8, FP9, P14
FP10, FP11, FP12, FP13, FP14, P15
FP15 P16
3.3.3 Etude fonctionnelle de degré 2
de FP2 P16
de FP3 P18
de FP6 P20
de FP8 P22
de FP12 P23
de FP13 P25
4. Affectation des ports du microcontrôleur P27

Baccalauréat STI Génie Electrique Académie de Besançon
Epreuve de construction Session 2007- V1-élèves
Lycée St Paul Besançon STATION DE NETTOYAGE ROBOTISEE Page 3
5. schémas structurels
De FP8, FP15 P29
De FP13 P30
De FP2 P31
De FP3 P32
De FP11 P33
De FP12 et FP14 P34
De FP6 P35
6. Travail demandé P36
7. Proposition de plan pour le rapport P43
8. Algorigrammes P44

Baccalauréat STI Génie Electrique Académie de Besançon
Epreuve de construction Session 2007- V1-élèves
Lycée St Paul Besançon STATION DE NETTOYAGE ROBOTISEE Page 4
1. Mise en situation
1.1 Introduction
Pour ce Thème de BAC 2007, nous vous proposons d’étudier un robot aspirateur conçu
par le constructeur IRobot.
I Robot s'est depuis longtemps engagé à fabriquer des produits robotiques qui rendent plus
sûre et plus facile la vie de personnes de tous horizons. Au cours de ces 14 dernières
années, IRobot a conçu et fabriqué des produits novateurs pour l'armée américaine, les
forces de l'ordre, les secteurs du nettoyage industriel et des jouets, et aujourd'hui, pour le
marché de consommation.
Le Roomba est un aspirateur automatique qui balaie et aspire tout seul les sols
domestiques. Il suffit de l'allumer et de partir pour qu'il nettoie l'intégralité du sol, en
parvenant même à atteindre les endroits difficiles d'accès, tels que le sol sous les lits, les
divans et les armoires.
Le Roomba fait appel à un processus de nettoyage en trois étapes afin de ne manquer
aucune saleté et de laisser derrière lui un sol parfaitement propre. Grâce à une technologie
de navigation intelligente, le Roomba utilise un processus de trajectoire circulaire.
Toutes les particules sont collectées dans un compartiment sans sac facile à retirer, à
vider et à remettre en place. Grâce à ses algorithmes d'intelligence artificielle, il couvre
tout le sol pendant le processus de nettoyage automatique.
Équipé d'un capteur de contours de la pièce, le Roomba se déplace aisément le long des
murs et autour des meubles afin de nettoyer l'intégralité du sol.
Sans accessoire supplémentaire, le Roomba est extrêmement léger (seulement 2,9 kg) et
très facile à porter et à ranger.
Le Roomba se révèle efficace sur presque tous les sols domestiques, dont le parquet en
bois dur, le linoléum, les carreaux et le stratifié, ainsi que sur les tapis à poil ras et moyens.

Baccalauréat STI Génie Electrique Académie de Besançon
Epreuve de construction Session 2007- V1-élèves
Lycée St Paul Besançon STATION DE NETTOYAGE ROBOTISEE Page 5
Le Roomba effectue même automatiquement la transition entre différents
revêtements de sol.
Une unité de cloisonnement virtuel vient compléter l'équipement du
Roomba : elle crée un mur invisible à l'aide d'un rayon infrarouge de 4 mètres
de large maximum afin de bloquer les passages ouverts ou de diviser de
grandes pièces.
Des capteurs de marches intégrés et un système de navigation intelligent
permettent également au Roomba de nettoyer ainsi jusqu'au bord sans jamais
tomber.
1.2 Eléments constitutifs du système technique
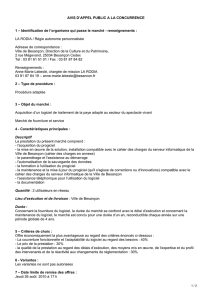
1. L’unité de cloisonnement virtuel :
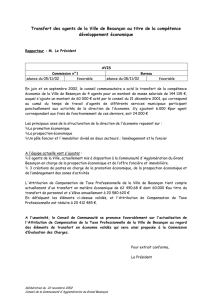
2. Le socle de chargement :
L'unité de cloisonnement virtuel sert à
délimiter la zone de travail de votre aspirateur
Roomba dans la pièce ou l'endroit à nettoyer.
Cette unité est en mesure de bloquer des
passages de porte d'une largeur maximale de
4m. L'unité de cloisonnement virtuel sert à
bloquer des passages ouverts ou à délimiter un
secteur dans une grande pièce.
L'aspirateur Roomba retourne
automatiquement à son socle lorsque la
batterie est presque vide ou quand il a fini le
nettoyage. Il se recharge en 3 heures.
L'aspirateur Roomba est toujours chargé
lorsque vous en avez besoin.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
1
/
45
100%