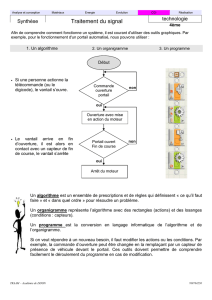
I – Présentation - Génie électronique

1
En électronique par :
M. ASSIE François M.DESVIGNE René M.SEVENO Loïc
En physique appliquée par :
M.GERMAIN Marc
En construction mécanique :
Mme GIRAULT Marina
Baccalauréat STI Génie Electronique
Thème de construction électronique
AUTOMATISME DE PORTAIL
L
LY
YC
CE
EE
E
A
A.
.C
CA
AM
MU
US
S
Session 2011
DOSSIER TECHNIQUE

2
I. Présentation
1. Mise en situation
L’objet technique étudié permet l’ouverture et la fermeture d’un portail d’accès à une copropriété de façon
automatique.
Un portail est généralement constitué de deux vantaux, identiques ou non. Pour automatiser le portail, chaque battant
doit être équipé d’une partie opérative. Par contre, une seule partie commande sera suffisante pour piloter
l’ensemble.
2. Définition du besoin
L’ouverture et la fermeture du portail d’une propriété peuvent être particulièrement contraignantes dans les cas de
figures suivants :
Manœuvre d’un portail lourd et de grandes dimensions, ce qui exige un effort et des déplacements importants.
Manœuvre du portail sous la pluie ou par grand froid ;
Passage d’un véhicule, exigeant son arrêt avant et après le portail pour l’ouvrir puis le fermer ;
Portail éloigné de l’habitation demandant donc un déplacement important pour le manœuvrer ;
Manœuvre du portail difficile par un enfant ou une personne handicapée.
L’automatisme de portail doit donc permettre de réduire voire d’éliminer ces contraintes d’utilisation.
3. Diagramme Sagittal
4. Fonction d’usage
L’objet technique étudié assure les manœuvres d’ouverture et de fermeture du portail en fonction des demandes de
l’utilisateur, tout en respectant les consignes de sécurité qui s’appliquent à ce type de système.
5. Schéma fonctionnel de niveau 2
Technicien
Usager en Véhicule
Réglage et
Maintenance
Ventaux
Automatisme
et
Zone automatisée
Obstacle
Mode de
fonctionnement
Demande
d’ouverture
Autorise le
franchissement
Manoeuvre
Position
Blocage
Intrusion
Bras, équerre de pilier,
Equerre de vantail
Gestion du
déplacement
Vantail en position
initiale
Vantail en
position finale
Energie de
déplacement
Demande et
Consigne de
déplacement
Informations
visuelles

3
6. Fonction globale
L’objet technique étudié est capable de gérer le déplacement d’un objet en fonction des demandes et des consignes
fixées par un utilisateur.
7. Caractéristiques techniques de l’automatisme de portail :
Alimentation
230 V
Fréquence
50 Hz
Alimentation moteur
12 V
Puissance par moteur
170 W
Puissance en veille
18 VA
Puissance maxi avec éclairage
600 VA
Eclairage de zone
500 W MAXI
Feu clignotant
100 W MAXI
Ouverture maxi de chaque vantail
120°
Temps d’ouverture à 90°
8 / 11 s en grande vitesse, le temps d’ouverture réglable
Largeur et hauteur maxi du vantail
3,5 m
Poids maxi du vantail
250 Kg
Température d'utilisation
-15°C/+60°C
Indice de protection
IP44
Bruit
<70dB
XXXXXXXXXEffort de poussée maxi à 1.25m
< 15 Kg (suivant norme P25-362 )
électronique
Intégrée dans le boîtier de commande
Fréquence de manœuvre maxi
intensif
Secours batterie
Oui
Débrayage manuel
De base de l’intérieur, en option de l’extérieur
Réglage par auto apprentissage
Oui
Récepteur radio et 2 barrières Infra-Rouges
intégré
Fréquence radio
433 Mhz
XXXXXXXXXX Nombre de codes mémorisables
32
Homologation PetT
96 0229 PPLO
Garantie
2 ANS / 15000 cycles maxi
8. SPECIFICATIONS DU PORTAIL A MOTORISER
• Cet automatisme peut automatiser des portails avec des vantaux mesurant jusqu'à 3,5m et pesant jusqu'à 250Kg.
• Le portail ne doit pas être installé dans un milieu explosif ou corrosif (présence de gaz, de fumée inflammable, de
vapeur ou de poussière).
• Cette motorisation de portail est un système de motorisation autobloquante. Votre portail à 2 battants doit
impérativement être équipé d'une butée centrale et de butées latérales. Les butées (centrales et latérales) doivent
arrêter le portail sans le verrouiller. Autrement dit, il faut supprimer toute serrure mécanique (ou gâche, loquet,…) et
tout sabot basculant ou arrêtoir.
• Les gonds du portail doivent impérativement être dans le même axe, et cet axe doit être impérativement vertical.
• Les piliers qui soutiennent le portail doivent être suffisamment robustes et stables de façon à ne pas plier (ou se
briser) sous le poids du portail.
• Sans la motorisation, le portail doit être en bon état mécanique, correctement équilibré, s'ouvrir et se fermer sans
frottement ni résistance. Il est conseillé de graisser les gonds.
• Vérifier que les points de fixation des différents éléments sont situés dans des endroits à l'abri des chocs et que les
surfaces sont suffisamment solides.
• Vérifier que le portail ne possède aucune partie saillante dans sa structure.
• La butée centrale et les butées latérales doivent être correctement fixées afin de ne pas céder sous la force exercée
par le portail motorisé.
9. MISE EN GARDE :
Instructions importantes pour la sécurité des personnes :
- L’installation doit être effectuée dans les règles de l’art, une installation incorrecte peut entraîner des blessures
graves.
- Ne pas laisser les enfants jouer avec les dispositifs de commande fixes. Mettre les dispositifs de télécommande hors
de portée des enfants.
- Vérifier fréquemment l'installation pour déceler tout mauvais équilibrage ou tout signe d'usure ou de détérioration
des câbles, des ressorts et du montage. Ne pas utiliser l'appareil si une réparation ou un réglage est nécessaire;
- Attention, certaines pièces peuvent peser plus de 20 Kg, les manipuler avec précaution;

4
- Avant d'installer la motorisation, vérifier que la partie entraînée est en bon état mécanique, qu'elle est correctement
équilibrée et qu'elle s'ouvre et se ferme correctement;
- S'assurer que l'écrasement entre la partie entraînée et les parties fixes environnantes dû au mouvement d'ouverture
de la partie entraînée est évité;
- S'assurer que l'organe commandant la manoeuvre soit situé en vue directe de la partie entraînée mais éloigné des
parties mobiles.
-après installation, s’assurer que le mécanisme est correctement réglé et que le système de protection et tout dispositif
de débrayage manuel fonctionnent correctement;
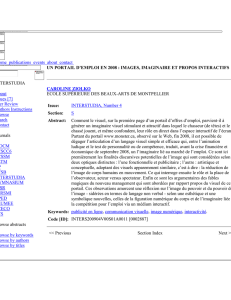
10. LES RÈGLES DE SÉCURITÉ
Au niveau des bords secondaires
Suivant l'installation, il peut exister une zone de cisaillement entre le battant et le coin du pilier .Dans ce cas, il est
conseillé de supprimer cette zone en laissant une distance utile de 100mm au minimum soit en positionnant les
butées latérales convenablement, soit en entaillant le coin des piliers sans les fragiliser ou les deux si nécessaire.
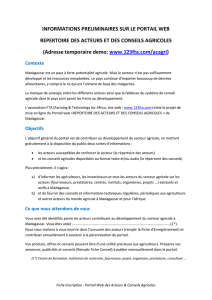
Au niveau des bords inférieurs :
Suivant l’installation, il peut exister une zone dangereuse pour le pied entre le bord inférieur du portail et le sol,
comme indiqué dans la figure suivante. Dans ce cas, il est conseillé de supprimer cette zone en laissant une distance
utile de 120mm au minimum, ou en limitant cette distance à 5mm.

5
Entre le portail et les vérins :
Dans le cas où l’installation est conforme aux spécifications données dans ce
manuel :
• Il n’y a aucun risque d’écrasement entre le portail et la base du vérin.
• Il y a risque d’écrasement entre le bout du vérin et le portail. Il est impératif
d’avertir l’utilisateur et de signaler ce risque sur l’installation.
Entre les battants et les parties fixes situées à proximité :
Suivant la configuration du site où se trouve le portail motorisé, il peut y avoir des zones
d'emprisonnement entre les battants en position ouverte et des parties fixes situées à proximité. Afin
de supprimer ces zones, il est obligatoire de laisser une distance de sécurité de 500mm minimum
entre la partie fixe située à proximité et les parties mobiles du portail motorisé.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%