Document

ESSI1- AUTOMATIQUE JEAN-PAUL STROMBONI, AVRIL 1998, TD 7
Utilisation de la Représentation d’état pour
l’étude de l’asservissement de position
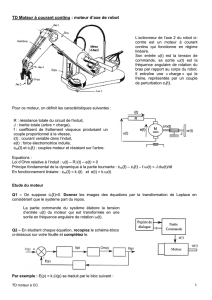
1. Pour un processus de positionnement utilisant un moteur à courant continu, on a obtenu les
équations suivantes en négligeant les frottements ainsi que l’inductance d’induit, à couple
résistant nul ;
est la position angulaire,
la vitesse,
u
et
i
la tension et le courant d’induit :
05 10
01
. ( )
( )
( ) . ( ) ( )
d
dt d
dt u t
d
dt t
i t t u t
Sachant que la résistance d’induit vaut
r1
, calculer la constante de f.e.m., le moment
d’inertie, et la constante de temps mécanique. En régime permanent, pour une entrée
u t U( )
constante, que valent vitesse de rotation et courant d’induit ?
2. Ecrire les équations d’état de ce processus sous la forme de commande. Préciser le vecteur
d’état
X t( )
choisi. L’entrée est
u
, on distingue la réalisation
A B C D1 1 1 1, , ,
où la sortie est
,
A B C D2 2 2 2, , ,
avec deux sorties
et
,
A B C D3 3 3 3, , ,
avec les sorties
, ,
. Dans
la suite, on considère le premier cas.
3. Analyser les équations du processus : équation caractéristique, valeurs propres, fonction de
transfert associée
F p( )
, découplage des variables d’état, calcul de l’exponentielle matricielle
eAt
, calcul de la réponse indicielle à partir de la solution générale de l’équation différentielle.
4. On étudie la mise en œuvre d’un retour d’état :
u t c t KX t c t a b X t( ) ( ) ( ) ( ) ( )
, où
c t( )
est un signal de consigne. Réécrire les équations d’état. Calculer le polynôme
caractéristique fonction de
a
et
b
. Choisir le retour
K
pour imposer une valeur propre double
p02
au système bouclé. Indiquer la réalisation parmi les trois précédentes qui permet de
mettre en œuvre directement ce retour d’état. Prévoir la réponse indicielle.
5. On cherche à appliquer la loi de commande proportionnelle
u t k c t t( ) ( ( ) ( ))
plus simple.
Quel est le lieu des valeurs propres pour
k0
? Régler
k
pour le régime critique. Comparer ce
système bouclé avec le précédent.
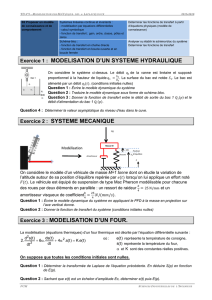
6. Le dispositif réel de positionnement présente un seuil (zone morte), du fait des frottements
« secs », et une saturation de
u
due à l’alimentation électrique. En pratique, pour
s u s
,
0
(
s
le seuil) et
V u V
(
V
saturation). Le bloc suivant traduit ces particularités:
expliquer sa signification. Indiquer comment se traduisent ces deux non linéarités sur le
comportement de l’asservissement lors d’un essai indiciel. Quel est l’effet du gain
k
?
xAx Bu
yCx
k
c t( )
+
_
-s
s
V
-V
u t( )
uidéal
1
/
1
100%