A. principe de l`étalonnage

CHAPITRE 3 : ÉTALONNAGE
A. PRINCIPE DE L’ETALONNAGE
Afin de pouvoir être utilisé dans des ponts de mesure l’autotransformateur NT1 doit être étalonné
pour connaître son coefficient de correction. La méthode d’étalonnage utilisé dans un premier
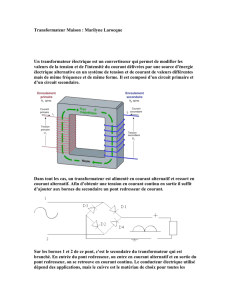
temps consiste à comparer la tension générée par une section de l’autotransformateur à une
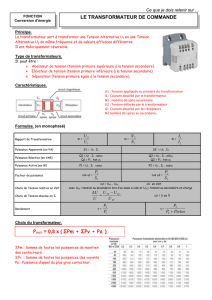
tension de référence réalisé à l’aide d’un transformateur étalon. Le schéma suivant présente le
principe de l’étalonnage.
La source αi.U (i étant le numéro de section) est piloté afin d’annuler la tension aux bornes
du détecteur D. αi est alors définit comme étant le coefficient de correction de la section i (il
s’agit ici de l’équilibrage de la boucle de mesure).
Ainsi la tension U0→1 entre la borne 0 et 1 peut s’écrire :
010 1
UU
3.1
Alors la tension entre la borne 0 et n (la borne déterminant le rapport de transformation)
s’écrit :
1100 ... nn nUU

- 2 -
Soit
1
0
01
1n
iin n
nUU
3.2
Et la tension entre les bornes n et 11 vaut alors :
10
11 11 ni in nUU
Soit
10
11 111
111 ni in n
UnU
On peut alors écrire le rapport de tension
n
n
U
U
0
11
sous la forme suivante :
1
0
10
11
0
11 1
1
111
111
1
11
n
ii
ni i
nn
n
n
n
nU
n
Un
c
nn
U
U
Avec
nn
c11
le coefficient de
correction du transformateur en étalonnage branché en rapport
nn11
1
0
10
11 1
111n
ii
ni i
n
nnn
c
3.3
En pratique on cherchera à déterminer le coefficient en rapport 10:-1, 3:8, 2:9…
B. LE BANC D’ETALONNAGE :
Une fois homologué, l’autotransformateur NT1 participera à la détermination de la valeur de
la constante de Von Klitzing RK à quelques 10-9. Il est donc nécessaire de connaître les
coefficients de corrections de NT1 pour les rapports utilisés lors de cette détermination avec
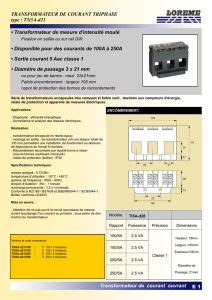
la même exactitude. Pour satisfaire cet objectif on utilise le pont suivant :

- 3 -
Géné
inj
.
Vers transformateur
d'injection
Vers boîtier
d'injection
D
V
H
V
B
R
w1
R
w2
C
w
T
A
Tare
garde
D
p
D
q
T
D
T
Alim
Dans ce pont on retrouve au centre sous l’appellation TA le transformateur en étalonnage, le
transformateur de tare (ici dessiné entièrement) et le système de détection. Toutefois à la
différence du schéma de principe la source permettant d’annuler la tension aux bornes du
détecteur se situer au niveau de l’alimentation du transformateur de tare, cette position ne
changer en rien l’équation 3.a.1. Dans les paragraphes suivant, j’explique un à un le
fonctionnement des différents éléments de ce pont.
1. La tension d’alimentation
La tension d’alimentation est réalisé à l’aide d’un générateur de fonction. L'incertitude sur la
fréquence affichée par l'appareil est de 20 ppm. L’amplitude du signal est modulé par un
générateur de tensions continue. A l’aide de celui-ci, on peut alimenter progressivement le
banc d’étalonnage de 0 volt à la tension de travail. En effet, en alimentant le banc
directement à la tension de travail on génère une tension transitoire susceptible de saturé les
transformateur. Afin d’atteindre les tensions souhaiter pour effectuer les étalonnage un
amplificateur multiplie la tension en sortie du générateur de fonction par 10.
Pour supprimer d’éventuel composante continue, on place en sortie de l’amplificateur un
condensateur de 10µF. Un transformateur double écran de rapport 4,5 est connecté en série
avec celle-ci et fournit une isolation galvanique entre le circuit d’alimentation et le banc
d’étalonnage. La tension aux bornes de ce transformateur est connecté à un bornier
fournissant un nombre suffisant de prise pour pouvoir connecter les différents appareils du
banc. Un voltmètre et connecté à celui-ci pour permettre de visualisé cette tension. Un
simple galvanomètre permet de visualiser l’amplitude de la tension d’alimentation. Malgré
son manque de précision (environ 1%), ceci n’apporte pas un manque de précision. En effet,
les étalonnages précédemment effectués mettent en évidence qu’une variation de 1% de la
tension d’alimentation n’a qu’un impact négligeable sur le coefficient de correction. Le
schéma suivant représente symboliquement la synthétisation de la tension d’alimentation.

- 4 -
2. Le transformateur de tare
La tension d’alimentation est appliqué à l’autotransformateur étalon. Il la divise alors par
onze. Cette nouvelle tension est comparé à une tension de tare. Cette dernière est généré à
l’aide d’un transformateur de tare. Il s’agit ‘un transformateur de rapport 1 :11. Le primaire
est bobiné de onze sections et le secondaire d’une seule. Chaque section est composé de
20 spires. La tension fournit au bornes du secondaire doit être stable pendant la durée de la
mesure. Pour cela, une série de précautions ont été prises au moment de sa fabrication.
Tout d’abord, le besoin d’exactitude du banc d’étalonnage implique d’utiliser un
transformateur double étage. Un écran en aluminium disposé autour du bobinage
magnétisant permet de figer les capacité entre les deux enroulements primaire. Un second
écran a été disposé autour du bobinage métrologique. Celui-ci est en µmétal afin de protéger
les deux enroulements primaire des perturbation électromagnétiques environnantes.
L’enroulement secondaire est réalisé à l’aide d’un câble coaxial dont l’âme est porté au
potentiel du point haut de cet enroulement (un transformateur de garde est utilisé pour
généré ce potentiel). De manière à ce que le primaire n’induise pas de tension dans l’âme du
câble secondaire, le point bas de la gaine n’est pas connecté. Le schéma ci-dessous
présente ces différents éléments.
3. le système d’injection
Le système d’injection est la source pilotable permettant de déterminé
i
en annulant la
tension aux bornes du détecteur. Ce coefficient de correction a une composante réelle et
une composante imaginaire. La tension αi.U doit elle aussi posséder ces deux
caractéristiques. Elle est réalisée en plusieurs étapes. Deux diviseurs inductifs divisent
chacun la tension d’alimentation U. Une des deux tensions obtenues est alors de déphasée
de
2
par rapport à la tension d’alimentation puis sommée à la tension issue de l’autre
diviseur inductif, c’est deux étapes s’effectuent au sein du boîtier d’injection. Le signal
résultant est injecté dans la boucle de mesure grâce à un transformateur d’injection de
rapport
100
1
dont le principe à était expliqué au chapitre II. Le schéma suivant représente le
système d’injection simplifié :
Le paragraphe suivant explique le fonctionnement de ces appareils mis en jeu dans ce
système.
Diviseur inductive de
phase (a)
Diviseur inductive de
quadrature (b)
Boîtier
d’injection
Transformateur
D’injection
Vers circuit
d’étalonnage
* : voir paragraphe sur le diviseur inductif
)(
1.1
a
)(
1.1
b
1.1 .iba
110.iba
Générateur de
fonction
Amplificateur
(x10)
Condensateur de
filtrage (10µF)
Transformateur
d’alimentation
Borniers

- 5 -
Les diviseurs inductifs :
Ces diviseurs constituent en faite deux transformateurs à rapport variable réalisé avec une
suite de transformateurs en cascades. Les schémas ci-dessous présentent la face avant
d’un diviseur inductif suivit du schéma du câblage interne.
Le réglage de la tension s’effectue modifiant la valeur de chaque décade S1, S2,…S7. La
lecture du diviseur inductif appelé k appliqué à la tension d’alimentation s’écrit alors :
7
1
71 10......,0 i
i
i
ii SUSSSk
. Avec une tension d’alimentation de l’ordre de 50 V, une
modification du rapport du diviseur de 10-1 appliquerai alors un échelon de l’ordre de 5V.
C’est pourquoi celui-ci a été modifié afin que cette décade soit en permanence à zéros. Ainsi
la lecture du diviseur inductif k s’écrit :
7
2
72 10......0,0 i
i
i
ii SSSSk
.
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%