Transformations chimiques lentes ou rapides

Terminale S 1
Bac David – Physique chimie
Mouvements plans
I/ MOUVEMENT D’UN PROJECTILE DANS LE CHAMP DE PESANTEUR
1.1/ Etude expérimentale
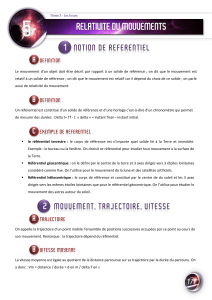
Visualiser le mouvement d’un projectile dans le champ de pesanteur lancé avec une vitesse
initiale
0
v
Observations
- La trajectoire du mobile est une parabole
- Le mouvement s’effectue dans un plan
- L’accélération verticale est égale à dvy/dt= -g, dvx/dt = 0 et dvz/dt=0
Essayons de retrouver ces résultats en appliquant le 2eme loi de Newton.
1.2/ Résolution analytique, équations horaires
Un projectile est lancé à la date t0 = 0 avec une vitesse initiale
0
v
faisant un angle avec
l’horizontal. On choisit un repère d'étude (O,
i
,
j
,
k
) tel que l'origine O coïncide avec la
position du centre d'inertie G du solide à la date t0=0s. Le plan (
i
,
j
) contient le vecteur
0
v
.
Les frottements et la poussée d’Archimède sont négligés.
Système étudié : la bille de masse m
Référentiel d’étude : le référentiel terrestre supposé galiléen
Inventaire des forces extérieures :
- le poids
gmP
.
L’application de la 2eme loi de newton montre que dans ces conditions :
Gext amPF
.
kdtdvjdtdvidtdvdtvdag zyxG
)/()/()/(/
( relation 1 )
La projection de la relation 1 donne :
dt
dt
dt
/dv
/dv
/dv
0
g-
0
z
y
x
j
k
o
x
y
i
z
0
v
g

Terminale S 2
Bac David – Physique chimie
On peut résoudre analytiquement ces trois équations différentielles et obtenir les équations
paramétriques de la vitesse :
Cv
Bt.gv
Av
z
y
x
A, B et C sont des constantes qui dépendent des conditions initiales (à la date t0 = 0) :
0v
sin.vv
cos.vv
0 z
00 y
00 x
0C
sin.vB
cos.
0
0
vA
0v
sin.vt.gv
cos.vv
z
0y
0x
On peut résoudre analytiquement ces trois nouvelles équations différentielles et obtenir les
équations paramétriques du mouvement :
'Cz
B').t( sin.vt.g
2
1
y
A' ).t ( cos.vx
0
2
0
A’, B’ et C’ sont des constantes qui dépendent des conditions initiales. A la date t0 = 0, les
coordonnées sont nulles :
'C0z
B').t( sin.vt.g
2
1
0y
A' ).t( cos.v0x
0
00
2
00
000
0
).t( sin..
2
1).t( cos.
0
2
0
z
vtgy
vx
)3(
)2(
)1(
Conclusion
- A tout instant la coordonnée z est nulle : le mouvement s'effectue dans le plan (
i
,
j
).
-
cos.
0
vx
, le mouvement sur l’axe horizontal est uniforme.
-
gdtdvy/
, l’accélération est verticale a tout instant de la trajectoire.
1.3/ Equation de la trajectoire
Equation de la trajectoire à partir des équations horaires paramétriques
L’équation (1) donne :
).t( cos.vx 0
cos.v x
t
0
(4)
L’association des équations (2) et (4) permet d’obtenir l’équation de la trajectoire :
x).( tanx
cos.v
g
2
1
- x
cos.v
sin.v
cos.v
x
g
2
1
y2
22
0
0
0
22
0
2

Terminale S 3
Bac David – Physique chimie
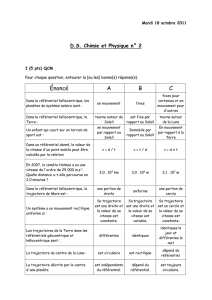
Influence de la valeur de la vitesse initiale v0 sur la trajectoire du projectile
Faisons varier la vitesse initiale v0 dans l'équation précédente
Influence de l’angle de tir sur la trajectoire du projectile
Faisons varier l’angle de tir dans l'équation précédente
II/ MOUVEMENT DES PLANETES ET DES SATELLITES
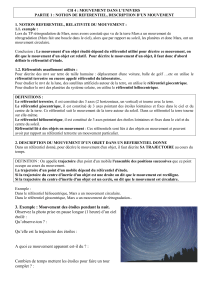
Référentiels héliocentrique et géocentrique
Le référentiel héliocentrique a pour origine le centre du Soleil. Les axes d’un repère sont dirigés
vers trois étoiles lointaines (c'est à dire pratiquement fixes).
Le référentiel géocentrique est animé d'un mouvement de translation curviligne par rapport au
référentiel héliocentrique. Les axes d’un repère sont dirigés vers trois étoiles lointaines.
x
y
v0 3
v0 2
v0 1
v0 1 < v0 2 < v0 3
et
est constant
1 > 2 > 3
et
v0 est constant
x
y
x
y
3
2
1
N
S
vers une étoile
lointaine
vers une étoile lointaine
vers une étoile
lointaine
N
S
N
S
référentiel
héliocentrique
référentiel
géocentrique

Terminale S 4
Bac David – Physique chimie
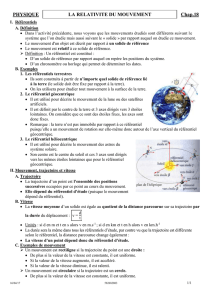
grand axe
2.1/ Lois de Képler
Première loi (loi des trajectoires) dans le référentiel héliocentrique, la trajectoire du centre
d'une planète est une ellipse dont le soleil est l'un des foyers.
Deuxième loi (loi des aires) le segment de droite reliant le soleil à une planète balaie des aires
égales pendant des durées égales.
Troisième loi (loi des périodes) pour toute planète du système solaire, le rapport entre le
carré de la période de révolution et le cube du demi grand axe est le même :
C
a
T
3
2
C est appelée constante de la loi des aires. Elle ne dépend pas de la planète
considérée.
Remarque : dans le référentiel héliocentrique les centres de la plupart des planètes du système
solaire ont une trajectoire quasi circulaire( F1 et F2 sont très proches). D’après la deuxième loi
de Képler leur mouvement est alors uniforme.
2.2/ Repère de frenet
s est l’abscisse curviligne c’est-à-dire la distance orientée parcourue par G sur sa trajectoire.
Il est alors commode de définir le repère de Frenet (G,
T
,
N
), c’est un repère mobile lié au
mouvement du point G.
La courbe décrite par un point est appelée trajectoire de ce point dans le référentiel d’étude.
On montre mathématique que
T
dt
ds
v
et
N
R
v²
T
dt²
d²s
a
r 2
r 1
2a
2b
F1
F2
r1 + r2 = 2a
Soleil
Les planètes se déplacent plus
rapidement lorsqu'elles sont proches
du soleil et plus lentement
lorsqu'elles en sont plus éloignées
sens de parcours de la trajectoire
T
N
R
trajectoire
cercle osculateur

Terminale S 5
Bac David – Physique chimie
T
est le vecteur unitaire tangent à la trajectoire.
N
est le vecteur unitaire normal à la
trajectoire et R le rayon de courbure de cette trajectoire au point considéré.
les composantes de la vitesse dans le repère de Frenet
0 v,
=
0 ,
dt
ds
les composantes de l’accélération dans ce repère
NT aa ,
=
R
v²
,
dt
dv
=
R
v²
,
dt²
d²s
2.3/ Mouvement circulaire uniforme
Considérons le mouvement circulaire uniforme (v=cste) du centre d’inertie d’un mobile autour d’un
point fixe.
Faire un schéma au tableau représentant la trajectoire ainsi que le vecteur vitesse.
Le mouvement est uniforme (v = constante) ; dans ce repère :
0
dt
dv
aT
Le mouvement est circulaire (R = constante) ; dans le repère de Frenet :
R
v
a2
N
Donc
N
R
v
a
2
Rajouter alors le vecteur accélération sur le schéma.
Le vecteur vitesse est tangent à la trajectoire. L'accélération est normale (contenue dans le plan
de la trajectoire) et centripète (dirigée vers le centre du cercle).
2.4/ Mouvement d’un satellite terrestre à orbite circulaire
Rappel
Enoncé de la loi de gravitation universelle
Deux corps dont la répartition des masses mA et mB est à symétrie sphérique, séparés d'une
distance AB grande devant leur taille, exercent l'un sur l'autre des forces attractives
B/A
F
et
A/B
F
, de même direction, de sens opposés et de même valeur :
BA
BA
BA u
AB
mm
GF
2
/.
BA
u
est un vecteur unitaire orienté de A vers B. (faire un schéma)
Dans le référentiel géocentrique, étudions le mouvement du centre d’inertie G d’un satellite de la
terre, animé d’un mouvement circulaire de rayon constant R. Nous admettrons que la trajectoire
est dans un plan contenant le centre O de la terre.
satellite
plan équatorial terrestre
 6
7
8
9
6
7
8
9
1
/
9
100%