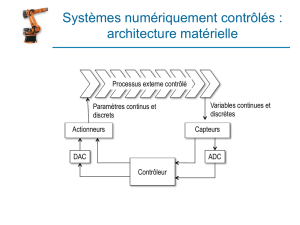
1. Principe du I2C

Principe du I2C Page 1
Cours 243-648 Communications Numériques A-08
Le bus I2C
Claude Barbaud 4 septembre 2008
1. Principe du I2C
Le I2C (Inter Integrated Circuit) est un bus série synchrone multi-maître qui
fonctionne sous la relation maître-esclave.
Développé par Philips. Géré par l’I2C bus comitee.
Maître-esclave
C’est le maître qui contrôle la communication, qu’il soit l’émetteur ou le
récepteur des données.
L’esclave est alors soumis au maître : il reçoit ou envoie des données sur
demande. La synchronisation est faite par le maître.
Série synchrone
Les communications sont synchronisées par une horloge (fournie par le
maître).
Multi-Maître
Plusieurs processeurs peuvent prendre le contrôle du bus. Le protocole
prévoit une procédure de prise de contrôle du bus.
3 fils
une horloge (SCL),
une ligne de données (SDA),
un commun.

Principe du I2C Page 2
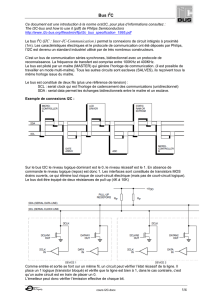
2. Hardware
La configuration du bus I2C est très simple : toutes les sorties sont à
collecteur ouvert ou à drain ouvert, et la logique est positive.
Par cette configuration, les lignes sont au niveau logique 1 au repos, sans
qu’aucun circuit ne place cette ligne à 1.
Il est nécessaire de placer des résistances de rappel (pull-up) pour définir
le niveau haut.
Le nombre de composants qu'il est possible de relier est limité par la
charge capacitive des lignes SDA et SCL : 400 pF . Un composant a une
charge entre 10 et 20 pF.
Les données sont transmises en série à 100Kbits/s en mode standard et
jusqu'à 400Kbits/s en mode rapide.
Une impulsion d’horloge est générée à chaque fois qu’un bit est transféré.
Pas de court-cicuit possible sur SDA et SCL.
3. Protocole logiciel
Avec le compilateur CCS
On doit placer la directive #use au début du fichier
#use i2c(master, SDA = PIN_C4, SCL = PIN_C3)
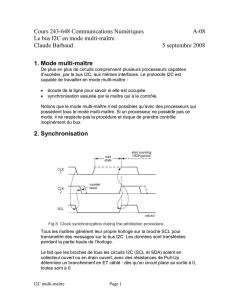
Au repos
Les lignes SDA et SCL sont au niveau haut (1 logique).
Condition de départ
Un processeur (maître) signale son intention de parler par la condition
START:
Il place SDA = 0 pendant que SCL est au repos (=1)
Le bus est alors occupé: les autres ne peuvent plus parler.

Principe du I2C Page 3
Avec le PIC: i2c_start();
Condition d'arrêt
Le processeur (maître) arrête de parler en replaçant la ligne SDA à 1
pendant que SCL est au repos ( = 1)
Le bus est alors libre: les autres peuvent parler
Avec le PIC: i2c_stop();
En activité
Les changements sur SDA ont lieu pendant que SCL = 0.
Format des transferts
Les données sont transférées en bytes. Le bit le plus important est envoyé
en premier.
1. On envoie d'abord l'adresse du périphérique. Cette adresse est sur 7
bits [A7..A1]
Le 8ème bit est le R/W: 0 = Write, 1 = Read.
Avec le PIC: i2c_write(adresse);
Des parties d'adresse sont déterminées d'avance pour un type de
périphérique. Les autres parties sont déterminées par matériel (état de
broches)
Liste partielle de périphériques

Principe du I2C Page 4

Principe du I2C Page 5
 6
7
8
9
6
7
8
9
1
/
9
100%