2938 Ko - Académie de Nancy-Metz

DOCUMENT RESSOURCE 1 / 34
DOSSIER RESSOURCE
DIAGNOSTIC-INTERVENTION
CONCOURS GENERAL DES METIERS
Maintenance automobile
Session 2005
DIAGNOSTIC-INTERVENTION
DOSSIER RESSOURCE

DOCUMENT RESSOURCE 2 / 34
Page 1: - Titre
Page 2: - Sommaire
Pages 1 à 13: - Multiplexage principe
Pages 14 à 27: - Equipement Peugeot 307
Pages 28 à 30: - Codification Alimentation
Pages 31 à 34: - Document station DIAG 2000
SOMMAIRE DU DOSSIER RESSOURCE

DOCUMENT RESSOURCE 3 / 34
MULTIPLEXAGE DES FONCITONS ELECTRIQUES
Le multiplexage consiste à faire circuler plusieurs informations entre divers
équipements sur un seul canal de transmission.
Ce principe est déjà utilisé pour le réseau téléphonique, la télévision, ou plus
simplement entre les outils de diagnostic et les calculateurs.
Le protocole de communication définit les règles, et le format des échanges entre
les éléments d’un réseau de circulation d’information.
On appelle le support de circulation d’information quel que soit sa nature (fils
électrique, fibre optique) un BUS d’information.
LES RESEAUX DE COMUNICATION
1) ARCHITECTURE RESEAU
On doit différencier deux besoins :
- Les échanges d’informations entre calculateurs pour une prise en compte
rapide (par exemple l’information changement de rapport BVA adressée au
calculateur de contrôle moteur),
- Les circulations d’informations entre composants de commande et de
puissance ne nécessitant pas un traitement immédiat, mais devant rester
inférieures au temps de perception du conducteur. (par exemple la
commande des phares ou de l’essuie glace arrière).
Pour répondre à ces besoins, plusieurs bus ou réseaux de communication
sont employés.
- Un réseau haute vitesse pour les échanges inter systèmes.
- Un réseau basse vitesse pour les échanges d’informations des
composants sans traitement immédiat : bus carrosserie, et bus confort.
Les protocoles de communication employés sont différents sur ces deux
réseaux il s’agit de :
- CAN (Controller Area Network), normalisé par BOSCH pour les échanges
inter systèmes,
- VAN (Véhicle Area Network), normalisé par PSA et RENAULT pour le bus
de carrosserie.

DOCUMENT RESSOURCE 4 / 34
Pour des raisons de fonctionnement, une passerelle inter système doit exister
entre les réseaux VAN et CAN.
L’élément chargé de cette passerelle inter système est le Boîtier de Servitude
Intelligent nommé BSI.
Le BSI assurera également dans ce cas la liaison avec un outil de diagnostic.
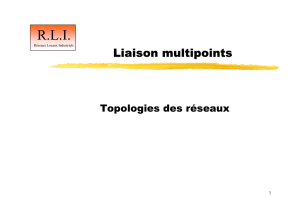
2) TOPOLOGIE RESEAU
Suivant le besoin de communication, l’architecture, la dimension, le débit
possible du réseau seront à adapter.
- La vitesse maxi de communication est inversement proportionnelle à la
distance maximale entre deux participants du réseau.
- Plus le nombre de participant pouvant accéder au réseau et émettre des
données augmente, plus la vitesse maximale diminue.
Pour le réseau de carrosserie ou les difficultés d’implantation, de passage et
de longueur de câble sont élevées, la topologie retenu est du type
maître/esclaves avec un réseau VAN faible vitesse (62500 bit/s).
Les esclaves n’ont pas la possibilité de parler spontanément sur le réseau.
L’unité maître interroge les esclaves à tour de rôle pour savoir si un
changement d’état à leurs bornes est intervenu (interrupteurs).
L’unité maître commande alors un boîtier esclave de faire une action en
rapport avec l’interrupteur commandé, exemple commande des veilleuses ou
des rétroviseurs.

DOCUMENT RESSOURCE 5 / 34
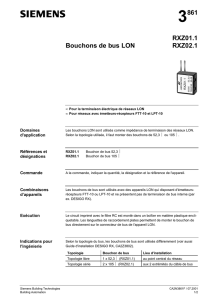
Pour le réseau de confort comprenant radio, climatisation, navigation,
afficheur multifonction, une topologie multi-maître/esclaves a été choisie. Le
réseau sera VAN à 125 000 bit/s.
MAITRE MAITRE MAITRE
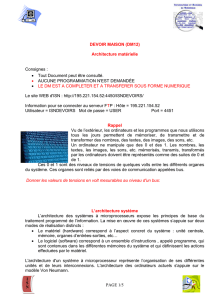
Pour le réseau inter système où les contraintes de rapidité de communication
sont les plus importantes, et où les besoins d’échanges sont
multidirectionnels, une topologie multi-maître a été retenue.
On emploiera ici un réseau CAN à 250 Kbit/s
MAITRE MAITRE MAITRE
3) LE MULTIPLEXAGE
A) PRESENTATION
Principe de fonctionnement des réseaux multiplexés VAN Ecran/Confort et
CAN.
Synoptique des réseaux multiplexés VAN/CAN.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
1
/
34
100%