titre du cours - bienvenue sur le site de parno77

- 1 -
582645361 LYCEE SALIEGE SUP PCSI
R
RO
OB
BO
OT
T
E
ER
RI
IC
CC
C
-
-
E
ET
TU
UD
DE
E
C
CI
IN
NE
EM
MA
AT
TI
IQ
QU
UE
E
D
DE
E
L
LA
A
P
PI
IN
NC
CE
E
Classe : PCSI
Niveau : 1ère année, 1ère période
Durée : 2 heures
Secteur d’activité :
Support :
Thème :
Référence programme :
Robotique : transitique
Robot industriel 5 axes ERICC 3
Mécanique du solide indéformable
Cinématique du solide indéformable
Modélisation géométrique et cinématique des liaisons
Compétences visées :
Le robot didactisé et les documents nécessaires étant fournis, l’étudiant
Etudie la structure géométrique et cinématique de la pince
Construit un modèle informatique de la pince
Compare les résultats de la simulation informatique avec ceux d’une méthode graphique
Connaissances associées :
Liaisons entre solides :
Paramétrage géométrique de la position d’un solide par rapport à un autre
Liaisons normalisées entre solides
Schémas normalisés
Degrés de liberté d’un solide par rapport à un autre
Schéma cinématique
Cinématique du solide indéformable
Vecteur position
Trajectoire
Vecteur vitesse
Prérequis :
Connaissance pratique de Solid Concept (non obligatoire)
Cours : étude des liaisons entre solides
cinématique du solide indéformable
Matériel et documents fournis :
Robot industriel 5 axes ERICC 3
Dossier pédagogique
Dossier technique
Dossier ressources
Document réponses
Critères d’évaluation :
Compte-rendu de TP, avec :
Résultat des différentes mesures demandées
Comparaison avec les résultats obtenus par simulation informatique
Commentaires justifiés

- 2 -
582645361 LYCEE SALIEGE SUP PCSI
R
RO
OB
BO
OT
T
E
ER
RI
IC
CC
C
-
-
E
ET
TU
UD
DE
E
C
CI
IN
NE
EM
MA
AT
TI
IQ
QU
UE
E
D
DE
E
L
LA
A
P
PI
IN
NC
CE
E
Problématique : on souhaite étudier le mécanisme de serrage de la pince du robot
manipulateur ERICC : quelle est sa structure, quelles sont ses performances ? Il est de plus
intéressant de confronter deux méthodes de vérification de ces caractéristiques : une méthode
graphique est-elle plus, ou moins fiable qu'une méthode informatique ?
On dispose pour cela :
du robot manipulateur ERICC instrumenté, piloté par informatique
du plan d'ensemble de la pince
d'une représentation schématique de la pince
du modèle informatique de la pince, contenu dans le fichier PINCE ERICC3 du logiciel Solid
Concepteur.
1- Structure de la pince :
A l'aide du logiciel de pilotage du robot manipulateur ERICC, commander l'ouverture ou
la fermeture de la pince : ces mouvements sont possibles grâce à l'utilisation d'un vérin
pneumatique à double effet, dont l'extrémité de la tige est reliée aux chaînettes de la pince,
par l'intermédiaire d'un câble en acier.
Observer les mouvements des différentes pièces du mécanisme.
Reconnaître les pièces sur le plan d'ensemble de la pince.
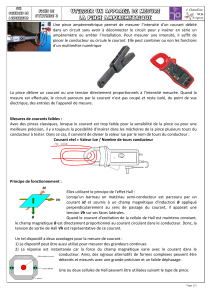
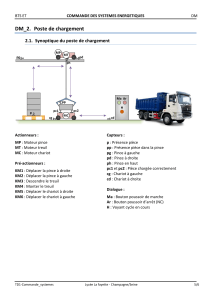
La figure ci-après représente la pince schématisée suivant le même modèle que sur le
logiciel Solid Concepteur :
C
F
x
y
O
A
B
D
E
G
M
N
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)

- 3 -
582645361 LYCEE SALIEGE SUP PCSI
Etude des liaisons entre les différentes pièces, aux points O, A, B, C, D, et F : ouvrir le site
www.lsuire.com, rubrique Cours\Modélisation, et retrouver le type de liaison convenant à celles
observées sur le mécanisme réèl.
Remarque : la chaînette GE est modélisée par deux barres en roulement sans glissement sur le
galet , lui-même en liaison pivot d'axe (F, z) avec le bâti (1). La chaînette est en liaison pivot
en E avec la biellette (3), et en G avec la tige de traction (7).
2- Construction du modèle Solid Concepteur :
Ouvrir le logiciel SOLID CONCEPTEUR
Ouvrir le fichier PINCE ERICC3 (Répertoire Sc\Robot ERICC3) : il comprend le modèle
incomplet de la pince.
A l'aide de la documentation d'utilisation du logiciel, compléter la représentation du
mécanisme (boîtes d’outils nécessaires : Filaire, Contraintes, Coordonnées).
On donne pour cela les coordonnées dans le repère (O, x, y) des points :
20
70
N
20
115
M
4
18
G
9
35
F
21,31
50
E
35
63
D
21
15
C
53
63
B
39
15
A
0
0
O
Placer ensuite les liaisons entre les différentes pièces du mécanisme :
- Menu Applications \ Meca
- Boîte d’outils Meca : cliquer sur Créer les pièces, puis cliquer tour à tour sur une
entité de chaque pièce du mécanisme.
- Cliquer ensuite sur Créer une liaison, et suivre les instructions
3- Etude informatique des performances cinématiques de la pince :
Cliquer sur Créer un modèle : lui donner un nom, et désigner l’ensemble du mécanisme
(décrire une fenêtre de capture à l’aide de la fonction Ensemble obtenue en cliquant sur le
bouton droit de la souris).
La pièce de référence est la pièce 1, passant par le point (0,0,0).
x
y
O

- 4 -
582645361 LYCEE SALIEGE SUP PCSI
Prendre pour paramètres de calcul :
- la tige de traction 7 recule par rapport au corps 1 à la vitesse de 0,01 m/s (mouvement
d’entrée)
- nombre de positions : 75
- durée : 1,15 s
et vérifier le bon fonctionnement du modèle : cliquer sur Animer le mécanisme.
En exploitant les possibilités du logiciel (boîte d’outils Meca), étudier la cinématique de la
pince :
- Tracer la trajectoire de (B
4/ Ro), et donner la norme de
)R/4B(V 0
- Tracer la trajectoire de (D
4/ Ro), et donner la norme de
)R/4D(V 0
- Tracer la trajectoire de (M
4/ Ro), et donner la norme de
)R/4M(V 0
- Tracer la trajectoire de (N
4/ Ro), et donner la norme de
)R/4N(V 0
Décrire alors le mouvement de la pièce 4 / Ro.
Déterminer la course de la tige de traction, et donc celle de la tige du vérin.
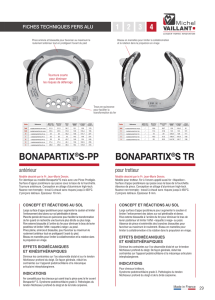
4- Etude graphique des mouvements de la pince :
On donne la représentation incomplète du mécanisme, à l'échelle 1,5 (document réponse).
Construire aux instruments la représentation de la demi-pince supérieure en position
fermée.
En déduire la course (= longueur du déplacement) de la tige de traction (et donc celle de la
tige du vérin).
Donnée : la chaînette GE a une longueur de 54,9 mm.
1
/
4
100%