Etude et réalisation d`un spectromètre RMN à champ faible
publicité

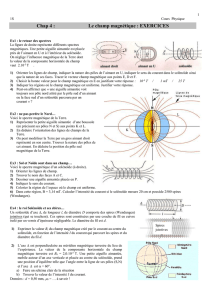
Multi-sondes pour un spectromètre RMN à champ faible T. Bourgeau, diplômé du Master 2 Capteur Mesure et Instrumentation, auteur de cette étude. Résumé : La Résonance Magnétique Nucléaire (R.M.N) est une science récente (1946) basée sur l’absorption et l’émission d’énergie des spins des protons. Lors d’une précédente étude, réalisée au Laboratoire d’Electricité Générale (E.S.P.C.I), nous avons démontré que le phénomène de R.M.N pouvait être observé en utilisant des champs magnétiques faibles de l’ordre de 0,1 Tesla. Pour arriver à ce résultat il a fallu tout d’abord concevoir et réaliser l’émetteur d’ondes radiofréquences ainsi que le récepteur en utilisant le phénomène d’induction. Le signal de résonance magnétique étant faible il fallait également optimiser le capteur réalisé afin d’améliorer au mieux le rapport signal sur bruit (SNR) lors de la réception. Les résultats nous ont permis d’observer un signal d’induction libre (F.I.D) ou écho de spin mais le récepteur crée n’était pas suffisamment sensible et nous avons donc étudié des solutions alternatives pour optimiser la forme et la structure du récepteur radio fréquence afin d’améliorer le signal reçu. Notre sonde est constituée d’une superposition de spires striées afin de diminuer les courants de Foucault qui viennent perturber le signal. Les différentes spires conductrices, d’épaisseur supérieure à l’épaisseur de peau, sont séparées par des couches de diélectrique permettant d’éviter tout court circuit entre les spires. Ce système permet d’augmenter le signal reçu grâce au couplage existant entre les différentes spires et permet aussi d’améliorer théoriquement le rapport signal sur bruit (SNR). Cette étude se base sur des aspects théoriques et reste un préalable à une éventuelle évolution de l’instrumentation à R.M.N. Pour une application ultérieure nous avons étudié le phénomène de R.M.N sur un échantillon d’eau de 2cm3. Ainsi pour un champ magnétique permanent de 0,1 Tesla, produit par un électroaimant, les spins des protons 1H, constituant l’échantillon d’eau précessent à une fréquence de 4,2 Mhz. «Up» et «Down», la différence d’énergie entre ces deux niveaux est égale à : 1. Le champ magnétique permanent Placé dans un champ magnétique permanent extérieur B0, le moment magnétique d’un atome peut tourner (précesser) autour de la direction du champ permanent. La fréquence de précession et l’amplitude du champ magnétique sont reliées par une constante appelée rapport gyromagnétique ( H ) et qui traduit le fait que plus le champ permanent extérieur est fort plus le spin nucléaire tourne vite autour de la direction du champ imposé. Cette constante est intrinsèque au noyau et agit comme un filtre, en ce sens que, pour un champ B0 donné, si on ajuste adéquatement la fréquence de précession, le phénomène de RMN n’agira que sur un noyau particulier. Le noyau d’un atome d’hydrogène se compose d’un seul proton possédant un moment cinétique de spin égal à : JH 1 2 E H B0 0 (3) Alors l’état d’énergie de l’atome n’est plus minimale. La pulsation de l’onde absorbée est appelée pulsation de Larmor et son expression est donnée par : 0 H B0 (4) L’ensemble des spins de l’échantillon se répartissent entre les niveaux d’énergie N (spin up) et N (spin down). La statistique de Boltzmann relie ces niveaux d’énergie par l’équation suivante, où k est la constante de Boltzmann et T est la température en Kelvin : (1) E Le moment magnétique qui en résulte est égal à : H H J H (2) Avec H 42,58 KHz / mT et H 1,4.1026 A.m2 pour le proton de l’hydrogène. Lorsque le champ statique extérieur B0 vient perturber le système à l’équilibre, il apparaît une différence d’état d’énergie des spins due à l’interaction entre le moment magnétique du proton et le champ magnétique B0. De plus il y a aimantation de l’échantillon et création d’une aimantation macroscopique M0 longitudinale. Cette aimantation, alignée suivant B0, est la résultante vectorielle de la myriade de spins protoniques occupant les deux orientations quantiques appelées N e kT N (5) La différence d’occupation entre les niveaux de spins peut être définie par : N N N E N kT (6) Soit un échantillon d’eau, de volume V=1m3 contenant N 3 10 2 8 atomes par m3, et soumis à un champ B0 de 0,1 Tesla à une température de 300 Kelvin. Cet échantillon subit une différence de population entre le niveau haut et le niveau bas d’état d’énergie, égale à : N 1 10 7 , ce qui 1 signifie que seulement un proton sur dix millions peut produire un signal de R.M.N dans l’échantillon. Le moment magnétique total M0 est la résultante de tous les moments magnétiques de chaque proton ayant réagit au champ B 0. La valeur et la direction de M0 seront données par l’équation suivante si on considère que : B B e 0 M 0 2 NH N eZ 0 Z A.m1 (7) Alors pour V=1m3, B0 = 0,1Tesla et T=300 Kelvin on trouve M 0 93 .1O 6 A.m 1 . 2.1 L’antenne de réception Une fois l’aimantation nucléaire M0 inclinée d’un angle 90 par rapport à sa position d’équilibre B0, on peut mesurer le retour à l’équilibre de l’aimantation transversale MXY à l’aide d’un capteur inductif placé dans un plan perpendiculaire à B0. Le récepteur placé autour de l’échantillon verra apparaître à ses bornes une force électromotrice induite proportionnelle à la relaxation de l’aimantation transversale MXY et donc proportionnelle à la variation de champ magnétique vu par le capteur. Pour pouvoir dimensionner et analyser le capteur inductif, nous rappellerons les équations régissant le principe de l’induction. Loi de Faraday : U ind dit d L dt dt spires enroulées autour d’un cylindre de longueur L S et de rayon R S . Si le solénoïde est alimenté par un courant I, distribué uniformément à travers la section efficace du conducteur, le champ magnétique B S ainsi que le flux magnétique S développé au centre du solénoïde à travers la surface S S RS 2 peut être déduit par l’intégration de la loi de Biot Savard si et seulement si RS LS et n est le vecteur unitaire perpendiculaire à la surface S S du solénoïde. Alors les équations du champ magnétique et du flux magnétique sont données par : NI B S 0 .n LS S S S BS .n (10) 0 N I R S2 LS (11) Pour N = 1, LS 25 mm on trouve BS 50H .A1 Le champ d’excitation B E résultant de la relaxation des spins nucléaires au temps t=0 peut être exprimé en utilisant le moment magnétique total M0. On trouve une relation pour le champ d’excitation égale à : BE o M 0 (12) (8) Flux magnétique: (t ) Li (t ) B(t )S cos (9) Une spire dont la surface est traversée par un champ magnétique oscillant à la pulsation de Larmor est soumise au phénomène d’induction et par conséquence, un courant variable i(t) de même pulsation est induit dans la bobine. La variation du flux magnétique entraîne alors une tension induite aux bornes de la bobine. Pour avoir un flux maximum à travers la spire et donc une tension induite maximale aux bornes du capteur il faut que le champ magnétique inducteur soit perpendiculaire à la surface de la spire. Comme l’aimantation transversale MXY appartient au plan X0Y, il faudra que le plan de la surface de notre capteur inductif soit perpendiculaire au plan X0Y pour capter le maximum de signal. L’axe de symétrie du capteur sera l’axe Y de sorte que la normale à la surface du capteur soit parallèle à l’axe Y. Un solénoïde sera utilisé comme capteur inductif car sa forme permet d’entourer tout l’échantillon, ainsi le signal capté donnera une information globale provenant de toutes les parties de l’échantillon étudié. Dans une première approximation, un solénoïde peut être assimilé à un conducteur composé de N tours de Figure 1 : représentation du récepteur : 1.tube à essai 2.solénoide à une spire , 3.Capacités CMS , 4.câble de mesure BNC 2 Le champ d’excitation BE génère un flux magnétique E à travers la surface S E RE2 de l’échantillon. Ce flux est égal à : Nous avons vu que pour un volume d’eau V=1m3 soumis à un champ B0 = 0,1T à T = 300 Kelvin, le moment magnétique total était égal à : Mo 93.1O 6 A.m 1 E S E B E .n E o M o R E2 cos( E .t ) (13) Soit E 2,34 10 14 Wb . En supposant que E S , et que E o , nous pouvons calculer le courant induit dans le solénoïde par la relation suivante : (16) Si maintenant on calcule le courant induit crée par la relaxation des protons de l’échantillon d’eau utilisé de rayon RE 8mm à travers le solénoïde à une spire de rayon RS 9,5mm et de longueur LS 25 mm nous obtenons à l’instant t = 0 un courant induit maximum de : 2 I (t ) Mo(t ) R E N R S 8.10 3 25.10 3 1,64A I ind (0) 93.10 3 9,5.10 6 2 L S cos( o t ) Mo t R E I (t ) e N T2 R S 2 L S cos( o .t ) (14) Le courant induit est donc une fonction périodique de période T 2 / o qui décroît de façon exponentielle dans le temps en fonction de la constante de temps T2. On voit que le courant produit est inversement proportionnel au nombre de spires constituant le solénoïde. De plus si un solénoïde, de longueur L S , de rayon R S , et constitué de N = 1 spire (Figure 1), mesure par induction la relaxation dans un échantillon cylindrique de rayon RE au temps t=0, le courant induit produit sera : R I1S (0) Mo E RS 2 LS (15) Tandis que pour N 100 spires le courant induit produit est cent fois plus petit que le courant induit avec une seule spire : I100S (0) Mo R E 100 RS 2 I (0) LS 1S 100 Ces résultats soulignent le fait que pour avoir le maximum de signal induit à la réception, notre solénoïde devra être constitué d’une seule spire au maximum sur toute sa longueur. En fait on peut aussi voir ce solénoïde comme étant un cylindre conducteur où les courants seraient uniformément répartis sur la surface. En pratique l’échantillon d’eau sera placé dans un tube à essai de rayon RE et le solénoïde sera constitué d’un cylindre conducteur, de rayon R S , réalisé à l’aide d’un scotch conducteur cuivré collé autour du tube à essai où se situe l’échantillon à mesurer (Figure 1). Nous noterons aussi que si l’on double la longueur, on doublera le courant induit et si l’on double le diamètre de l’échantillon on quadruplera le courant induit. Ceci peut s’expliquer par le fait que si l’échantillon soumis aux différents champs magnétiques augmente alors le nombre de spins réagissant augmentera aussi. On peut effectivement augmenter le signal de réception en augmentant les dimensions du capteur à condition de ne pas augmenter le bruit. Pour connaître la tension induite aux bornes du solénoïde en fonction du courant induit il nous faut calculer l’inductance propre du solénoïde à partir du flux magnétique préalablement donné. La formule théorique de l’inductance d’un solénoïde de surface S S RS2 , composé de N spires sur une longueur L S et alimenté par un courant uniforme dans chaque spire égal à i I / N où I est le courant généré dans l’ensemble des N spires est donnée par : L solénoide S i o N 2 R S2 LS (17) Pour R S = 9 mm, N = 1 spire et L S = 25 mm, on trouve une valeur théorique d’inductance égale à : Lsolénoide 12,7nH On remarque que l’inductance est proportionnelle au carré du rayon du solénoïde et est inversement proportionnelle à sa longueur. Ce qui veut dire qu’on devra diminuer la longueur et augmenter le rayon du solénoïde afin d’augmenter la valeur de l’inductance. Pour augmenter le signal induit aux bornes du récepteur, nous utiliserons un circuit électronique résonant, dans lequel nous connecterons le solénoïde. 2.2 Atténuation des courants de Foucault 3 La loi de Lenz nous dit que tout champ magnétique oscillant rencontrant un conducteur produit dans ce conducteur des courants qui tendent à s’opposer au champ oscillant extérieur. Ces courants sont d’autant plus intenses que la fréquence du champ extérieur est élevée. Dans notre cas le conducteur est représenté par le solénoïde en cuivre de rayon R S , de hauteur L S et d’épaisseur e . Comme le champ extérieur oscille à une fréquence élevée f 0 4,25 MHz on peut imaginer que le récepteur subit des courants en son volume qui tendent à s’opposer au champ pulsé extérieur. Ces courants sont généralement appelés, courants de Foucault (Figure 2). Donc si ces courants s’opposent au champ extérieur, il y a des chances pour que notre échantillon ne puisse jamais être en contact avec le champ magnétique pulsé. Figure 3 : Représentation des courants de Foucault dans la nappe de cuivre d’épaisseur e, de longueur L S et de largeur R S . Figure 2 : Représentation des courants de Foucault prenant naissance sur le solénoïde soumis au champ extérieur B1. Nous allons donc étudier ces courants de Foucault sur notre récepteur en partant de l’équation de Maxwell Faraday. Pour simplifier notre approche du problème on considérera que la bande cuivrée, de conductance cu , constituant le solénoïde, sera déroulée de façon à former une nappe de cuivre (Figure 3), de largeur R S , de longueur L S et d’épaisseur e . Le champ extérieur sera de la forme : B1 (t ) B1 cos(t ).e X (18) En régime variable, en raison du phénomène d’induction apparaît un champ électrique E1 . Ce résultat est la conséquence de l’équation de Maxwell Faraday qui est donnée par la relation suivante : B1 (t ) ro t E1 0 t D’après la Figure (3) le système est invariant par rotation autour de l’axe X et par translation le long de l’axe X. Donc tout plan passant par le point M et contenant l’axe X est un plan d’antisymétrie alors le champ électrique E1 sera perpendiculaire à ce plan. Comme la densité volumique de courant est proportionnelle au champ électrique, en passant en coordonnées cylindriques on peut donner son expression : J 1 cu .E1 ( , t ).e (19) Ces lignes de courants sont en cercle concentrique centrées sur l’axe X cst . En intégrant la relation de Maxwell Faraday sur le contour d’une ligne de courant C de rayon à travers une surface plane S s’appuyant sur C dont le vecteur normal à cette surface est n e X , on peut déterminer la densité volumique de courant par : d E1 .d B1 (t ).n.dS dt S C (20) Alors dB1 (t ) 2 dt Soit l’expression de la densité volumique de courant : 2 E1 4 J 1 cu B1 sin(t ).e 2 (21) Comme nous l’avions prévu le courant de Foucault est plus intense lorsque la fréquence augmente. Maintenant on doit déterminer la puissance perdue et dissipée par effet Joule à travers le volume du conducteur dont la cause provient des courants de Foucault. La variation de puissance P à travers le volume V peut être exprimée par : J2 P E1 .J 1 1 V cu (22) Pˆ V t 1 P N2 V (26) t Donc si l’on fait 6 entailles dans la bande de cuivre on divisera la puissance dissipée dans le conducteur d’un facteur 36 . Sur ce principe nous allons modifier notre récepteur pour diminuer les effets des courants de Foucault, en espérant que les entailles ainsi créées limiteront l’importance des courants de Foucault et favoriseront la pénétration du champ magnétique pulsé à l’intérieur de l’échantillon. L’intégration de cette expression sur le volume V des courants de Foucault dans la bande de cuivre s’obtient par : P P 1 2 J 1 .dV cu cu 2 4 RS B12 sin 2 (t ) e 2 3 d 0 Si le volume V RS2 e alors la puissance devient : Figure 4 : Nappe de cuivre de largueur V P cu 2 B12 R S2 sin 2 (t ) 8 (23) Si maintenant on cherche à calculer la puissance volumique moyenne dissipée dans le conducteur dans le temps, il faudra intégrer l’expression précédente sur une période T0 du signal soit : P V P V cu 8 t cu t 16 2 B12 R S2 2 1 T0 2 sin (t )dt T0 0 (24) B12 R S2 On remarque donc que la puissance volumique dissipée dans le temps est proportionnelle au carré du rayon de la bande de cuivre. Une solution pour réduire cette perte due aux courants de Foucault est de subdiviser le rayon de la bande de cuivre en N bandes en prenant garde de ne pas subdiviser la bande de part en part pour éviter de créer un solénoïde multi spires (Figure 4). Alors si cette bande de cuivre possède N coupures et que la distance entre les coupures est égale à : R Rˆ S S N (25) Alors la nouvelle puissance volumique moyenne dissipée dans le conducteur devient : R S et de longueur L S ayant subit 6 entailles. 2.3 Mode de fabrication des bandes striées Pour être efficaces les stries réalisées sur la bande conductrice doivent avoir une largeur comprise entre 10 20 m afin de diminuer l’impacte des courants de Foucault. Plusieurs technologies sont envisageable comme : le Laser, l’arrachage cathodique (inverse de la pulvérisation cathodique) ou les techniques de circuits imprimés. Cette dernière solution, à savoir l’utilisation des techniques utilisées pour les circuits imprimés semble être la solution la plus simple et la moins onéreuse car elle est déjà utilisée à grande échelle. Il faut d’abord imprimer les stries sur du papier calque comme pour la réalisation de pistes d’un circuit imprimé, la précision dépend de l’imprimante utilisé et des logiciels d’empreinte de circuit comme Eagle Layout éditor ou Orcad permette d’atteindre les précisions escomptés pour la largeur des stries. Afin de révéler les stries sur la bande conductrice plusieurs type de résines sont disponibles. Les résines négatives pour lesquelles le rayonnement ultraviolet entraîne une polymérisation des zones exposées, conférant ainsi à ces zones une tenue particulière au solvant de révélation alors que les parties non insolées disparaissent sélectivement dans ce solvant (par exemple la résine SU-8-2035). Les résines positives 5 pour lesquelles le rayonnement UV produit une transformation chimique des macromolécules, entraînant une solubilité accrue des zones exposées dans le révélateur, (résines AZ-9260, S1818). Les résines inversibles ont-elles la propriété de changer de polarité suite à une étape de recuite dit d’inversion (AZ-5214, TI09XR). L'ensemble des résines photosensibles s'utilisent en films minces (quelques fractions de micromètre à plusieurs micromètres), uniformes, de grande qualité et adhérents. Pour appliquer une de ces résines à couche mince on devra utiliser une machine d’enduction. Cette étape permet d’enduire sur le substrat une couche homogène de résine par centrifugation. Pour cela il faut disposer d’un système de mise en rotation à grande vitesse de la plaque à résiner par une tournette TP6000SET ou d’une tournette RC-8 Karl Suss avec gyrset permettant d’uniformiser l’épaisseur de résine sur des substrats n’ayant pas de géométrie circulaire. Pour l’utilisation de résines inversible, il faudra cuire le substrat à 90° pour qu’il y ait évaporation du reste. Il faudra coller la bande de cuivre de 35 m à l’aide de colle sanolite ou de phénylsalicilate (salicole) à un waffer afin de faciliter la gravure. Après insolation à la lumière UV à l’insoleuse on laissera le substrat dans un révélateur approprié à la résine afin de révéler les pistes puis on rincera à l’eau le substrat avant l’étape de gravure. Pour atteindre la précision attendue on utilisera de préférence les résines AZ5214 ou SU-8-2035 afin d’avoir une largeur de strie de 10 20 m , ces résines offrent des épaisseurs de plusieurs dizaines de micromètres à plusieurs centaines de micromètres et elles se caractérisent par leur capacité à produire des motif aux facteur de forme élevés (rapport de la hauteur sur la plus petite dimention) . Le gravage s’effectuera dans un bain de perchlorure de fer (2Fe3+ + Cu) pour attaquer la fine couche de cuivre qui n’est pas protégé par la résine par réaction chimique. Après rinçage du substrat à l’eau et éventuellement rinçage à l’alcool pour mieux révéler les stries, nous décollerons le waffer à l’aide d’acétone afin de garder uniquement la bande de cuivre striée qui nous sert de récepteur. Cette technologie fortement utilisée pour les nanotechnologies et les circuits imprimés nous permettra de graver un nombre élevée de stries par échantillon tout en restant d’une précision optimum pour la largeur du gravage. Ensuite les bandes striées seront accordées à l’aide de capacités CMS afin de répondre à la fréquence de Larmor attendue. 3. Analyse du bruit Bien que la force de la Résonance Magnétique Nucléaire réside dans son pouvoir à déterminer complètement des structures chimiques cette technique reste très sensible au bruit ambiant. Afin d’améliorer le rapport signal sur bruit de l’instrumentation R.M.N des solutions à la fois expérimentales et théoriques ont été mises en œuvre dans le passé. Hoult et Richards ont étudié le comportement du rapport signal sur bruit pour des récepteurs R.M.N à induction et en ont déduit la forme analytique du S.N.R : SNR 02 S VS Vbruit (27) Où 02 est la pulsation de Larmor déterminée par le champ magnétique B0, S est la sensibilité du récepteur RF, Vbruit est la tension de bruit totale, V S est le volume de l’échantillon et est le coefficient de proportionnalité qui dépend de la température, de la densité et du type de protons utilisés. La sensibilité du récepteur a été donnée implicitement lors du chapitre 2. en calculant théoriquement le champ crée par le solénoïde en fonction du courant soit : S BS 0 LS I La tension de bruit totale Vbruit provient d’une part, de la tension de bruit thermique liée au récepteur et d’autre part à la tension de bruit thermique due à l’échantillon. Des études ont montrées que la principale source de bruit pouvait être approximé au bruit thermique du récepteur en négligeant le bruit thermique due à l’échantillon soit : V bruit 4 k B R Sol T f (28) Où f est la bande passante du récepteur, k B est la constante de Boltzmann, Rsol est la résistance du solénoïde, et la température du système T 300 Kelvin . Alors l’expression du SNR est proportionnel à l’inverse de la racine carrée de la résistance du récepteur soit : 02 S VS 1 (29) SNR 4 k B T f RSol Pour calculer la résistance d’un solénoïde à une spire, Rsol , ayant une longueur supérieure au rayon RS LS , on doit tenir compte de l’épaisseur de peau dans le cylindre en cuivre car dans le cas des hautes fréquences le courant alternatif induit à tendance à être confiné à la surface du conducteur dans une couche d’épaisseur dépendante de la fréquence f o du champ magnétique oscillant. La densité de courant sera donc considérée comme uniforme sur une surface S LS autour du cylindre de périmètre P 2RS . En partant de la 6 formule générale d’une résistance et en prenant en compte tous les paramètres précédents on trouve une formule générale pour la résistance du récepteur égale à : R sol () P S cu 2R S (30) L S cu conducteur, pouvait modifier la résistance totale du récepteur (figure 5). Si R est la résistance d’une couche conductrice alors RN correspond à la résistance de N couches conductrices séparées par une fine épaisseur de diélectrique alors la résistance du solénoïde multi couche en fonction du solénoïde monocouche est donnée par l’expression suivante où N est le nombre de couche utilisé soit : Avec : 1 (31) T f o cu A la fréquence de résonance f 0 4,25 MHz , et donc 31,7m .On remarque qu’à la fréquence de résonance, l’épaisseur de peau est inférieure à l’épaisseur du récepteur (35 m ), ce qui indique que le courant induit sera confiné dans une partie du volume du récepteur. Une approximation du SNR en fonction des paramètres précédent donne une expression égale à : SNR 02 0 VS cu 1 8 k B T f RS LS (32) On remarque par cette formule que le SNR peut être diminué en jouant sur le rayon et la longueur du récepteur. Donc on pourra augmenter les dimensions, largueur et rayon de la sonde afin d’améliorer le rapport signal sur bruit. Comme le SNR est inversement proportionnel à la racine carrée de la résistance du récepteur, on cherchera à augmenter la résistance du récepteur afin de diminuer le SNR. Pour cela on étudiera la situation ou plusieurs bandes conductrices sont superposées et séparées par une couche d’isolant permettant ainsi d’augmenter l’efficacité face au bruit. N N 12 N 1 RN R N 2 3 (33) Si on réinjecte l’expression (33) dans la formule du SNR (32) on obtient une formule du SNR pour N couche égale à SNRN: SNRN SNR 1 N N 12 N 1 N2 3 (34) On remarque donc que l’ajout de plusieurs couches conductrices striées améliore nettement le SNR et permet donc de réduire fortement le bruit du système. Figure 5 : Représentation de plusieurs bandes de conducteur strié intercalé entre différents diélectrique multi couche : ici N = 4. 4. Sondes multi couches 4.4 Conclusion On peut voir la sonde multi-couche comme étant une superposition de solénoïdes striée séparés par des couches d’isolant ou de diélectrique par exemple du polyurethane ou de résine à base d’époxy. Le courant circulant dans chaque couches conductrices est uniformément distribué à travers la largueur. Pour l’étude théorique on considérera les solénoides infiniment long et les champs et courants seront considérés comme sinusoïdaux mais pas égaux selon la couche considérée. La direction du champ RF est tangentielle à la surface des solénoïdes. Une étude sur les multi couche de conducteurs pour des récepteurs à RMN à montré que l’ajout de N couches conductrices d’une épaisseur égale ou supérieur à l’épaisseur de peau et séparé par une fine couche de diélectrique, permettant d’éviter tout court circuit entre L’inconvénient majeur des sondes à RMN réside dans le fait quelles sont fortement sensible au bruit. Nous avons vu l’intérêt d’utiliser des solénoïdes monospire comparé au solénoïdes multi-spires car le signal reçu est supérieur et permet donc d’augmenter les chances de capter un signal de F.I.D. De plus la géométrie liée au récepteur améliore le SNR. Si les dimensions de la sonde sont augmentées, largeur et longueur du solénoïde, cela permet d’améliorer le SNR. Enfin le fait de superposer plusieurs solénoïdes conducteurs en cuivre séparés par une fine couche de diélectrique permet aussi de diminuer l’effet du bruit et améliore donc le signal à la réception. Cette étude est un préliminaire à une réalisation pratique montrant l’intérêt des multi-sonde pour une instrumentation à RMN à champ faible. 7