Energie potentielle - enseignement Catholique

HPT UAA15 CC 161122
1
Clarifications conceptuelles à l’usage du professeur
Se déplacer en toute sécurité
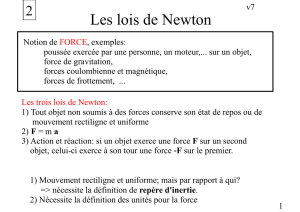
Notion de force
Une force est toute cause capable de modifier l’état de mouvement (ou de repos) d’un objet ou de le
déformer. Modifier l’état de mouvement d’un objet signifie l’accélérer, le ralentir ou modifier la direction
de son mouvement (c’est-à-dire sa trajectoire)
1
.
Comme application considérons un joueur de volley qui effectue son service. La balle passe d’un
état initial de repos dans sa main, à un état de mouvement ascensionnel. Le physicien explique ce
changement d’état par l’action d’une force exercée par la main du joueur sur la balle. C’est cette force
qui permet à la balle d’acquérir de la vitesse. Ensuite, en raison de la force de pesanteur que la Terre
exerce sur elle, la balle ralentit, s’arrête, puis commence à redescendre. Enfin, le joueur frappe la
balle afin de la mettre en mouvement vers le joueur adverse ; au contact du sol, la balle change une
nouvelle fois de direction. A nouveau, c’est l’action d’une force exercée par le joueur, puis par le sol,
qui explique les modifications de trajectoire et de vitesse de la balle. Notons que la balle subit
d’importantes déformations au moment du contact avec le poing du joueur ou avec le sol ; ces
déformations sont également une conséquence des forces exercées sur la balle.
Dans le système international, l’unité de la force est le newton (1 N). Une force se mesure à l’aide d’un
dynamomètre : un dispositif constitué d’un ressort dont l’allongement se lit sur une échelle graduée
2
.
Une force est une grandeur vectorielle ; elle est caractérisée par un point d’application (toujours
placé sur l’objet qui subit la force), une orientation (ligne d’action et sens) et une intensité. Le vecteur
force se représente graphiquement au moyen d’un vecteur (une flèche dont la longueur est
proportionnelle à l’intensité). Il se note
, où A désigne la source et B désigne la cible de la force.
Si on ne s’intéresse qu’à l’intensité de la force, on note FA/B. Deux forces ont la même orientation si
elles ont même ligne d’action et même sens ; deux forces ont des orientations opposées si elles ont
même ligne d’action et des sens opposés ; deux forces sont opposées lorsqu’elles ont des
orientations opposées et des intensités égales.
Une force intervient toujours en interaction : lors du service, le joueur de volley modifie le mouvement
de la balle, mais la balle modifie aussi légèrement le mouvement de son bras. Quand le poing du
joueur exerce une force sur la balle, la balle exerce une force sur le poing. Cette deuxième force,
appelée réaction, s’exerce en même temps que la première. Les deux forces ont la même ligne
d’action, mais des sens opposés. Ce principe des actions réciproques
3
est toujours vérifié : dès
qu’il y a action, il y a réaction. L’action et la réaction se représentent au moyen de deux vecteurs
opposés ayant leurs origines sur les objets en interaction. Notons que ces forces ne s’annulent pas,
car elles s’exercent sur des objets différents (il n’y a donc aucun sens à les additionner). Lorsqu’on
décrit une force, il est essentiel de spécifier l’objet qui en est la source et celui qui en est la cible. Pour
reprendre l’exemple de la balle de volley, au moment où le poing exerce sur la balle une force
, la
1
Une force peut aussi agir sur la mise en rotation d’un objet: songeons à la force qui met en mouvement une
toupie ou un tour de potier. Nous ne considérons ici que les mouvements de translation.
2
Robert Hooke (1635-1703) a montré que, pour des allongements suffisamment petits, l’allongement d’un ressort
est proportionnel à l’intensité de la force exercée.
3
La troisième loi de Newton.
HPT
Formation scientifique
UAA15

HPT UAA15 CC 161122
2
balle exerce sur le poing une force opposée
. Ces deux forces ne s’annulent pas car elles ne
s’exercent pas sur les mêmes objets.
Résultante et équilibre de forces
Ces trois schémas représentent un objet O (par exemple un caddie de supermarché sur roulettes…)
subissant deux forces colinéaires, c’est-à-dire de même ligne d’action.
4
La première est exercée par
A (par exemple Amélie…) et se note :
, ce qui se lit « la force exercée par A sur O ». La
deuxième est la force exercée par B (Bernard…) et se note :
.
5
La résultante de deux forces agissant sur un même objet est une force unique qui, à elle seule, a le
même effet que les deux forces réunies. Lorsque les deux forces ont même ligne d'action et même
sens, leur résultante a la même ligne d'action, le même sens et une intensité égale à la somme des
intensités des deux forces (schéma de gauche). Lorsque les deux forces ont même ligne d'action et
des sens différents, leur résultante a la même ligne d'action, le sens de la plus grande et une intensité
égale à la valeur absolue de la différence des intensités des deux forces (schéma du centre).
Comme la résultante de deux forces est une nouvelle force qui remplace les deux premières, elle ne
s'ajoute pas à celles-ci. Nous avons choisi de représenter les résultantes dans les schémas ci-
dessous à l’aide d’une double flèche, en ayant soin de placer une barre sur les forces qu’elles
remplacent. Remarquons que la recherche d’une résultante n'a de sens que pour des forces agissant
sur un même objet (et n'a donc pas de sens pour des actions réciproques qui agissent toujours sur
des objets différents).
Un objet initialement au repos soumis à plusieurs forces reste au repos (donc en équilibre) si la
résultante de toutes celles-ci est nulle, sinon il se met en mouvement dans la direction et le sens de la
résultante. Dans le cas où toutes les forces s’exerçant sur un objet sont colinéaires (c’est-à-dire ont
une même ligne d’action), il suffit de s’assurer que la somme des intensités des forces s’exerçant
dans un sens est égale à la somme des intensités des forces s’exerçant dans le sens opposé (voir ci-
dessus schéma de droite, pour un objet sur lequel n’agirait que 2 forces horizontales).
Inversement, si un objet est en équilibre, cela implique que toutes
les forces qu’il subit ont une résultante nulle.
Pour vérifier l’équilibre, il faut s’assurer de n’avoir oublié aucune
force. Par exemple, dans le cas d’une armoire contre laquelle un
homme s’appuie vers la gauche (figure ci-contre), les forces
agissantes sont les suivantes :
la poussée de l’homme (la force
dirigée vers la gauche),
6
4
Même si l’objet subit encore d’autres forces (la pesanteur, la résistance du sol…), nous ne considérons pour le
moment que les forces horizontales.
5
Les points d’application de ces deux forces sont normalement situés sur la surface de l’objet O, mais par souci
de simplification et de visibilité, nous avons déplacé ces points d’applications pour les placer au centre de l’objet
O. Ce déplacement ne pose pas de problème : l’action d’une force sur un objet ne dépend pas de son point
d’application tant qu’il est situé sur la ligne d’action de la force.
6
Dans la suite, nous noterons chaque force par une lettre différente et nous omettrons les indices mentionnant
l’objet-source et l’objet-cible, afin d’alléger les notations.
O
O
O
O
O
O

HPT UAA15 CC 161122
3
le poids de l’armoire (la force
dirigée vers le bas),
la résistance du sol (la force
dirigée vers le haut),
la force de frottement statique exercée par le sol (la force
dirigée vers la droite).
Les intensités de ces quatre forces sont telles que tant la
résultante des forces horizontales que celle des forces verticales
est nulle, ce que nous résumons en disant que la force totale est
nulle.
Le poids d'un objet (ou force de pesanteur) est la force avec
laquelle cet objet est attiré par la Terre (ou l'astre près duquel il
se trouve). Sa ligne d'action est verticale et son sens dirigé vers
le bas. Son intensité se mesure en newtons (N) à l'aide d'un
dynamomètre. Cette intensité dépend de l'endroit où l’objet se
trouve : elle diminue (faiblement) avec l'altitude, augmente
(faiblement) avec la latitude sur Terre, et varie d'un astre à
l'autre.
Un objet posé sur un support horizontal est soumis à deux
forces : la pesanteur exercée par la Terre sur l’objet vers le bas
(la force
dans le schéma ci-contre) et la résistance exercée
par le support sur l’objet vers le haut (la force
). Ces deux forces sont égales en intensité car l’objet
est en équilibre, mais ne sont pas des actions réciproques, puisqu’elles agissent sur le même objet.
L’action réciproque à
est une force exercée par l’objet sur la Terre vers le haut (la force
, en
pointillés).
7
Cette force n’a pas d’effet visible sur la Terre tant sa masse est importante. L’action
réciproque à
est une force exercée par l’objet sur le support (la force
, également en pointillés).
Elle peut provoquer la déformation du support selon la nature de celui-ci.
En première approche, on peut considérer que la masse d'un objet est liée à la quantité de matière
8
qui constitue l’objet. Elle se mesure en kilogrammes (kg) à l'aide d'une balance et ne dépend pas de
l'endroit où l'objet se trouve. En un endroit donné, l'intensité G du poids et la masse m d'un objet sont
directement proportionnels :
, où la constante de proportionnalité (appelée constante de
pesanteur et notée g) dépend de l'endroit où l'on se trouve. Sur Terre, à nos latitudes, au niveau de la
mer, g = 9,81 N/kg. A l’occasion du principe fondamental de la dynamique (voir plus loin), nous
verrons que la constante de pesanteur g correspond aussi à l'accélération d'un corps en chute libre, et
peut donc s'exprimer en m/s².
Vitesse et accélération dans les mouvements rectilignes
Dans de très nombreuses situations, on peut considérer la trajectoire d’un mobile comme étant
rectiligne, soit que la trajectoire suivie est réellement une ligne droite (par exemple un ascenseur), soit
que les changements de direction n’ont pas d’importance (par exemple un train où on ne s’intéresse
qu’à la valeur de la vitesse telle qu’elle apparaît au compteur). Comme le mouvement est rectiligne,
choisissons comme référentiel un axe gradué, l’axe OX, de même orientation que le mouvement.
Ainsi la position du mobile est décrite par un nombre réel : l’abscisse d’un point du mobile sur l’axe
OX, que nous notons x.
Si, pour un mobile en mouvement rectiligne quelconque, nous mesurons la position x en deux instants
distincts : l’instant initial ti et l’instant final tf,
t est la durée du mouvement et s’obtient en calculant la différence entre l’instant final et
l’instant initial:
if ttt
(unité SI : 1 s)
9
. Notons que si le chronomètre démarre à zéro à
l’instant initial (ti = 0), nous noterons simplement la durée par le symbole t ;
7
Nous choisissons de représenter les forces secondaires (qui ne s’exercent pas sur l’objet étudié) en pointillés.
Cette représentation permet en outre de bien mettre les actions réciproques en évidence.
8
La quantité de matière (qui se mesure en moles) et la masse (qui se mesure en kilogrammes) ne sont pas
identiques, mais dépendent étroitement l’une de l’autre.
9
La notation « Δt » se lit « delta t » et signifie que la valeur a été calculée en effectuant une différence de temps.

HPT UAA15 CC 161122
4
x est le déplacement et s’obtient en calculant la différence entre la position finale et la
position initiale :
if xxx
(unité SI : 1 m). Notons que
x est positif quand le mobile se
dirige dans le sens de l’axe OX, négatif dans le cas contraire. Nous privilégierons le symbole
d quand on n’observe qu’un déplacement unique ;
vm est la vitesse moyenne pour ce laps de temps et s’obtient en effectuant le rapport du
déplacement par la durée :
if
if
mtt
xx
t
x
v
ou
(unité SI : 1 m/s).
Si la position ne varie pas au cours du temps (mobile à l’arrêt), le déplacement
x vaut zéro. Si le mobile
se déplace dans le sens opposé à celui de l’axe OX, la valeur de x décroît avec le temps : la vitesse est
négative. Si la valeur de x s’est accrue durant l’intervalle de temps
t, la vitesse est positive.
Pour déterminer des vitesses, deux démarches sont possibles :
On peut rechercher la vitesse moyenne entre deux instants donnés en calculant le rapport entre
x et
t pour l’intervalle considéré.
Si la vitesse varie continuellement, on peut estimer la vitesse instantanée à un certain instant t,
en calculant une vitesse moyenne pour un intervalle de temps le plus petit possible comprenant
l’instant t.
10
Comme application, considérons les deux premières colonnes du tableau ci-contre présentant les
mesures des temps et des positions correspondantes pour une nageuse ayant effectué deux
longueurs de 25 mètres, départ plongé.
Nous pouvons tout d’abord nous intéresser à la vitesse
moyenne pour l’ensemble de sa prestation en calculant :
.
Si vous désirons savoir lors de quelle longueur la nageuse a
été la plus rapide, nous devons calculer :
pour obtenir la
vitesse moyenne de la nageuse dans sa première longueur ;
et
pour obtenir sa
vitesse moyenne dans sa deuxième longueur.
Nous concluons donc que la nageuse a été moins
performante dans la deuxième longueur.
Enfin, si nous désirons connaître le plus précisément
possible l’évolution de la vitesse de la nageuse tout au long
de son mouvement, nous calculons ses vitesses tous les 5
mètres (voir les trois dernières colonnes du tableau). Nous pouvons considérer ces vitesses comme
des vitesses (quasi-)instantanées, puisqu’on ne dispose pas d’informations plus précises.
Considérons à présent un mobile se déplaçant dans le sens de l’axe OX et dont on connaît la vitesse
v en deux instants distincts. Les vitesses peuvent être soit mesurées à l’aide de capteurs, soit
calculées de la manière présentée plus haut.
Soient vi et vf les vitesses en deux instants distincts ti et tf ;
v est la variation de vitesse pour ce laps de temps et s’obtient en calculant la différence entre
la vitesse finale et la vitesse initiale :
if vvv
(unité SI : 1 m/s) ;
10
En pratique, nous nous contenterons de déterminer cette vitesse pendant une durée suffisamment petite, pour
que le mouvement puisse y être considéré comme étant à vitesse constante. Les compteurs kilométriques et
autres indicateurs de vitesse (tachymètres) mesurent des vitesses quasi instantanées, car une vitesse ne peut se
mesurer que quand la durée est différente de zéro.
t
(s)
x
(m)
t
(s)
x
(m)
v
(m/s)
0,0
0,0
2,5
5,0
2,5
5,0
2,0
5,5
10,0
3,0
5,0
1,7
11,0
15,0
5,5
5,0
0,9
16,0
20,0
5,0
5,0
1,0
22,0
25,0
6,0
5,0
0,8
26,5
30,0
4,5
5,0
1,1
32,0
35,0
5,5
5,0
0,9
39,0
40,0
7,0
5,0
0,7
47,0
45,0
8,0
5,0
0,6
56,0
50,0
9,0
5,0
0,6

HPT UAA15 CC 161122
5
am est l’accélération moyenne pour ce laps de temps et s’obtient en effectuant le rapport de la
variation de vitesse par la durée :
t
v
am
(unité SI : 1 m/s²).
Notons que la variation de vitesse, et donc l’accélération peuvent être négatives, ce qui signifie
que le mobile décélère. L’accélération est nulle lorsque la vitesse reste constante durant
l’intervalle de temps considéré.
Pour déterminer des accélérations, deux démarches sont possibles :
On peut rechercher l’accélération moyenne entre deux instants donnés en calculant le rapport
entre v et t pour l’intervalle considéré.
Si l’accélération varie continuellement, on peut estimer l’accélération instantanée à un certain
instant t, en calculant une accélération moyenne pour un intervalle de temps le plus petit possible
comprenant l’instant t.
11
Les deux mouvements rectilignes types
Quand nous désirons faire des prédictions à propos du mouvement d’un mobile (quel sera son lieu
de rencontre avec un autre mobile ? Au bout de combien de temps arrivera-t-il à tel endroit ? …), nous
avons besoin de lois qui décrivent son mouvement. Il est alors utile de supposer que son mouvement
correspond à un mouvement-type, répondant à des lois les plus simples possibles.
Outre le repos, le mouvement-type le plus simple est le mouvement rectiligne uniforme (MRU),
défini par une trajectoire rectiligne et une vitesse constante. Conformément au principe d’inertie
12
, un
mobile effectue un MRU si et seulement si la résultante de toutes les forces qu’il subit est nulle, c’est-
à-dire s’il reste sans cesse à l’équilibre.
13
Cette condition est très contraignante et aucun mobile ne
suit vraiment ce mouvement, mais certaines portions de mouvements peuvent s’en rapprocher
suffisamment pour que les prédictions soient utiles.
Les lois du MRU sont utiles pour résoudre les applications numériques. La loi de la vitesse est
évidente, puisque par définition du MRU, la vitesse est constante au cours du temps :
Un autre type de mouvement simple est celui d’un mobile suivant une trajectoire rectiligne et soumis à
une accélération constante (MRUA)
14
. Tout comme pour le MRU, aucun mobile ne suit vraiment ce
mouvement idéal, mais certaines portions de mouvements peuvent s’en rapprocher suffisamment
pour que les prédictions soient utiles (songeons au cas d’un objet en chute libre ou d’un véhicule qui
freine à bloc devant un obstacle).
Comme pour le MRU, les lois du MRUA sont utiles pour résoudre les applications numériques. La loi
de l’accélération est évidente puisque, comme par définition du MRUA, l’accélération est constante
au cours du temps :
Par transformation de cette égalité, on obtient la loi de la vitesse :
tavv .
0
.
La loi du déplacement d’un mobile en MRUA s’obtient en remplaçant la vitesse par la moyenne entre
la vitesse initiale v0 et la vitesse finale v dans l’égalité
, et en isolant le déplacement :
11
Comme pour la vitesse instantanée, les accélérations instantanées se déterminent en pratique en considérant
l’accélération moyenne pendant une durée assez courte, pendant laquelle l’accélération peut être considérée
comme constante.
12
Voir plus loin la section sur le principe d’inertie.
13
Comme nous le verrons plus loin, ce principe n’est pas valable dans tous les systèmes de référence.
14
Mouvement rectiligne uniformément accéléré. Certains auteurs parlent aussi de MRUV (mouvement rectiligne
uniformément varié). Les notions de MRU et MRUA sont évoquées ici pour éclairer le lecteur ; elles ne figurent
pas parmi les notions à connaître par les élèves.
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%