3.5.1.2Utilisation de ce type de moteur

1
Ministère de l’enseignement supérieur et de la recherche scientifique
Université de QASDI MERBAH – OUARGLA
Faculté de science et science de l’ingénieur
Département de mécanique
3éme année (ST/LMD)
Option : énergétique
MÉMOIRE
De Fin d’Etude Pour Obtenir le Diplôme de Licence en Mécanique
TÈHME
Fait par : Dirigé :
TEMMAR yacine prof. GEURMITE
GOUAMID boumadien
SEBIHI kheireddine
BENCHEIKH ilyas
L’année universitaire 2009/2010
Les Machines Électriques

2

3

4

5
1-Généralisé.
Une machine électrique est un dispositif électromécanique permettant la conversion d’énergie
électrique en énergie mécanique, ainsi que la conversion d’énergie mécanique en énergie
électrique. Suivant les conditions d’utilisation, une seule et même machine électrique peut
opérer la conversion d’énergie dans les deux sens, c'est-à-dire qu’elle peut fonctionner soit en
moteur soit en génératrice : les machines électriques sont dites réversibles
1-1Classifications des machines électriques :
Les machines électriques font intervenir comme éléments fondamentaux :
- les courants électriques ;
- les champs magnétiques.
Le fonctionnement est donc basé sur les lois de l’électromagnétisme
On peut classer les machines électriques en trois catégories :
1-1-1Les machine génératrices :
Ce type de machine transforme l’énergie mécanique en énergie électrique
Selon que le courant électrique induit est continu ou alternatif, la machine génératrice sera
appelée dynamo ou alternateur
On remarque que :
- dans le cas de l’alternateur, par rotation du champ magnétique, le circuit étant fixe ;
- et dans le cas de la dynamo, par rotation du circuit électrique dans un champ magnétique
fixe.
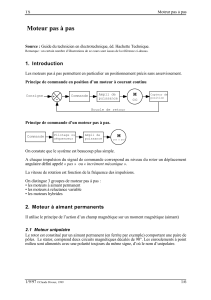
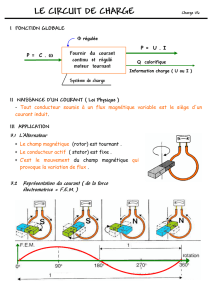
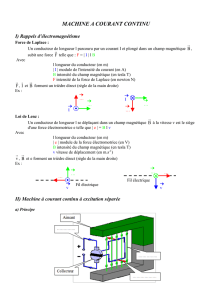
1-1-2Les moteur électriques :
Leur fonctionnement est basé sur l’obtention d’un effort mécanique par action d’un champ
magnétique sur un circuit électrique traversé par un courant fourni par une source extérieure,
qui peut produire le champ magnétique
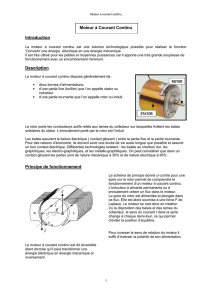
Selon que le courant électrique fourni par la source extérieure est continu ou alternatif, la
machine sera appelée moteur à courant continu ou moteur à courant alternatif
(synchrone ou asynchrone).
Elle inclure plusieurs types, comme : Le moteur asynchrone ; Le moteur synchrone ; Les
moteurs à courant continu. Ce que nous allons en discuter dans notre exposé en détaille
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
1
/
73
100%