Chapitre 2 : Régulateur Tout-Ou-
Rien
1. Introduction
Un régulateur «Tout-Ou-Rien» est un régulateur qui élabore une action de commande
discontinue qui prend deux positions ou deux états 0 et 1 (ou 0 et 100%).
On trouve par exemple des capteurs de type TOR (tout ou rien) dans l'industrie pour la
détection de présence d'objets, ces capteurs ne renverront que deux niveaux logiques :
0 = absence d'objet 1= présence d'objet
Exemples de régulateurs TOR : Un interrupteur électrique, un thermostat constituent des
dispositifs tout ou rien.
2. Propriétés du régulateur TOR
Les systèmes qui sont à fonctionnement tout ou rien, sont caractérisés par une sortie ne
pouvant prendre que deux (parfois trois) valeurs distinctes.
La valeur de la sortie est en générale déterminée par l’intervalle dans lequel se trouve
la valeur d’entrée.
C’est une régulation discontinue, sa réalisation impose de se fixer une limite
inférieure et une limite supérieure de la grandeur réglée.
Elle est utilisée quand la dynamique du procédé est très lente (grande constante du
temps).
Les régulateurs tout ou rien sont utilisés pour la commande des systèmes ayant une
grande inertie où la précision de régulation n’est pas importante. A titre d’exemple la
régulation d’un four à l’aide d’une résistance chauffante.
Les régulateurs tout ou rien classiques sont par exemple les thermostats et les
soupapes (clapets) de sécurité qu’on utilise dans les systèmes de sécurité.
Dans ce qui suit, on note u(t) et y(t), respectivement, l’entrée et la sortie du TOR.
3. Régulateur TOR idéal
Le régulateur TOR idéal possède deux valeurs de la sortie : +M et –M, et son fonctionnement est
décrit comme suit :
Si l’entrée appliquée au TOR est négative, la sortie est –M
Si l’entrée appliquée au TOR est positive, la sortie est +M
Remarque 1:
Le cas où l’entrée est nulle (u(t) = 0) peut être ajouté à l’une des conditions u(t) < 0 ou u(t) > 0.

Exemple1 :
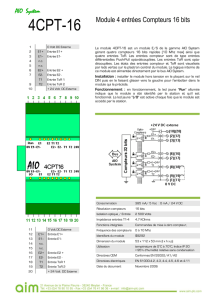
On prend comme exemple un signal sinusoïdal dont l’expression est donnée par : =
2sin(). On choisit M = 1
4. Régulateur TOR asymétrique
Le régulateur TOR asymétrique possède deux valeurs de la sortie : +M et –M et son fonctionnement
est décrit comme suit :
Si l’entrée appliquée au TOR est inférieure à une certaine valeur eseuil, la sortie est –M
Si l’entrée appliquée au TOR est supérieure à la valeur eseuil, la sortie est +M
Remarque 2:
Le cas où u(t) = eseuil peut être ajouté à l’une des conditions u(t) < eseuil ou u(t) > eseuil
0 2 4 6 8 10 12 14 16 18 20
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Entrée du TOR
Sortie du TOR
Figure 2.2 Exemple de régulateur TOR idéal
Figure 2.1 Régulateur
TOR idéal
u
(
t
)
y
(
t
)
M
M
= < 0
+ 0
La commutation –M +M s’effectue lorsque 0
La commutation +M -M s’effectue lorsque < 0
y
(
t
)
eseuil
u
(
t
)
+M
0
Figure 2.3 Régulateur
TOR asymétrique
-M
= <
+
La commutation –M +M s’effectue lorsque
La commutation +M -M s’effectue lorsque <

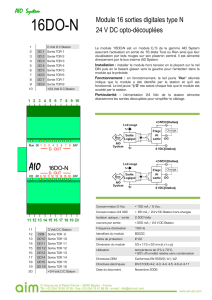
Exemple 2 :
On reprend le même exemple du signal sinusoïdal, on choisit M = 1 et eseuil = 0.5
5. Régulateur TOR avec seuil
Le régulateur TOR avec seuil possède trois valeurs de la sortie :0, +M et –M et son fonctionnement est
décrit comme suit :
Si l’entrée appliquée au TOR est inférieure à une certaine valeur -useuil, la sortie est –M
Si l’entrée appliquée au TOR est entre les valeurs -useuil et useuil, la sortie est 0
Si l’entrée appliquée au TOR est supérieure à la valeur useuil, la sortie est +M
Remarque 3:
Le cas où u(t) = - peut être ajouté à l’une des conditions u(t) < -useuil ou u(t) > -useuil
Le cas où u(t) = peut être ajouté à l’une des conditions u(t) < useuil ou u(t) > useuil
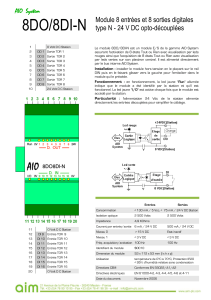
Exemple 3 :
On reprend le même exemple du signal sinusoïdal, on choisit M = 1.5 et useuil = 1
0 2 4 6 8 10 12 14 16 18 20
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Entrée du TOR
Sortie du TOR
Figure 2.4 Exemple de régulateur TOR asymétrique
y
(
t
)
useuil
u
(
t
)
+M
0
Figure 2.5 Régulateur
TOR avec seuil
-M
= <
0 ()
+ >
La commutation –M 0 s’effectue lorsque >
La commutation 0 +M s’effectue lorsque >
La commutation +M 0 s’effectue lorsque
La commutation 0 -M s’effectue lorsque
-useuil

6. Régulateur TOR avec hystérésis
L’hystérésis est le phénomène qui caractérise les systèmes qui possèdent deux caractéristiques
distinctes en fonction du sens de variation du signal d’entrée : lorsque le signal croît, le point
de fonctionnement du système se déplace sur une de ces courbes. Lorsqu’il décroît, il se
déplace sur l’autre.
Le régulateur TOR avec hystérésis possède deux valeurs de la sortie : +M et –M et son
fonctionnement est décrit comme suit :
Si la sortie du TOR est à +M il y aura une commutation vers –M lorsque l’entrée atteint la valeur
2
Si la sortie du TOR est à -M il y aura une commutation vers +M lorsque l’entrée atteint la valeur
2
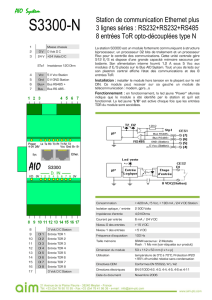
Exemple 4 :
On reprend le même exemple du signal sinusoïdal, on choisit M = 1, h = 3 et on initialise la
sortie à -M
0 2 4 6 8 10 12 14 16 18 20
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Entrée du TOR
Sortie du TOR
Figure 2.6 Exemple de régulateur TOR avec seuil
Figure 2.7 Régulateur
TOR avec hystérésis
u
(
t
)
y
(
t
)
M
M
2
2
La commutation –M +M s’effectue
l’entrée atteint la valeur
2
La commutation +M -M s’effectue
l’entrée atteint la valeur
2

On initialise la sortie du TOR à –M
La sortie reste à-M tant que <
2, une fois cette valeur atteinte la sortie du TOR devient +M.
La sortie reste à +M tant que >
2, une fois cette valeur atteinte la sortie du TOR devient –M et
ainsi de suite.
7. Régulateur TOR avec hystérésis asymétrique
Le régulateur TOR avec hystérésis possède deux valeurs de la sortie : +M et –M et son
fonctionnement est décrit comme suit :
Si la sortie du TOR est à +M il y aura une commutation vers –M lorsque l’entrée atteint la valeur
2
Si la sortie du TOR est à -M il y aura une commutation vers +M lorsque l’entrée atteint la valeur
2
Exemple 5 :
On reprend le même exemple du signal sinusoïdal, on choisit M=1, h=1, = 1.5 et on initialise
la sortie du TOR à 0
0 2 4 6 8 10 12 14 16 18 20
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Entrée du TOR
Sortie du TOR
Figure 2.8 Exemple de régulateur TOR avec hystérésis
La commutation –M +M s’effectue
l’entrée atteint la valeur
La commutation +M -M s’effectue
l’entrée atteint la valeur
Figure 2.9 Régulateur TOR avec
hystérésis asymétrique
u
(
t
)
y
(
t
)
M
M
 6
7
6
7
1
/
7
100%