4Cinématique des corps ponctuels
4.1 Problèmes de khôlle
4.1.1 Piéton et voiture
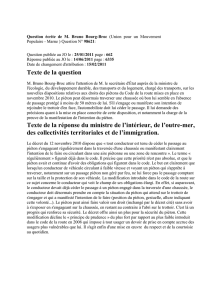
Dans une rue étroite, un piéton et une voiture circulent, chacun à vitesse constante. On note #”
vpla
vitesse du piéton et #”
vvcelle de la voiture.Dans un premier temps, le piéton souhaite traverser la rue le
plus lentement possible sans se faire heurter par la voiture qui ne l’a pas vu.
x
y
•O`
eH
L
Piéton et voiture gardent chacun une vitesse constante et une trajectoire rectiligne.
1. Établir la loi horaire du mouvement de la voiture à travers les coordonnées xvet yvdu centre de
son pare-choc avant. Quelle est la loi horaire des coordonnées de la partie supérieure du pare-choc
avant ?
2. Le piéton garde une trajectoire rectiligne, d’angle αpar rapport à l’axe Ox. Représenter sur un
schéma la trajectoire du piéton, puis établir la loi horaire de sa position à travers celle de ses
coordonnées xp(t)et yp(t).
3. Montrer que le choc sera évité si vp(2(L−`) sin α+ (H+e) cos α)>(e+H)vv.
4. En déduire l’expression de la vitesse minimale que doit alors prendre le piéton.
Le piéton décide de traverser la rue perpendiculairement à son axe, mais cette fois le conducteur
est plus attentif et freine dès que le piéton met un pied sur la chaussée. Ce freinage se traduit par une
décélération constante βet la voiture garde une trajectoire rectiligne parallèle à l’axe Ox.
5. Établir la loi horaire du mouvement de la voiture à travers la coordonnée xvdu centre de son
pare-choc avant.
6. À quelle condition portant sur βle véhicule s’arrête-t-il avant d’arriver au niveau du piéton ?

4. Cinématique des corps ponctuels 4.1. Problèmes de khôlle
4.1.2 Baywatch & Mitch Buchannon
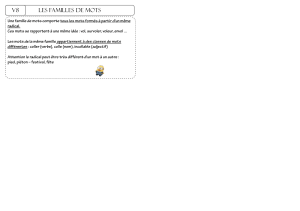
Dans la série « Baywatch », Mitch Buchannon est un maître-nageur de la plage de Malibu, qui passe
son temps à sauver de la noyade divers personnages. On suppose qu’à l’instant t= 0 Mitch est immobile
dans son poste de surveillance noté Pquand survient un début de noyade en un point noté N.
•
P
`
L
•
N
•
I
x
| ||
0H
x
1. Mitch part en ligne droite et accélère avec une accélération constante βjusqu’à atteindre sa vitesse
maximale vs. Donner l’expression de l’instant t1auquel il atteint cette vitesse maximale.
2. Exprimer la distance alors parcourue.
La distance calculée précédemment est négligeable devant celle qu’il doit parcourir sur le sable puis
dans l’eau. On néglige alors cette phase d’accélération et on considère désormais qu’il garde, dans l’eau
comme dans le sable, une vitesse constante, respectivement vepour l’eau et vspour le sable.
3. Tracer les trajectoires limites dans lesquelles il minimise d’une part son temps de parcours dans
le sable, puis d’autre part son temps de parcours dans l’eau et exprimer alors la durée totale du
sauvetage dans chacun des deux cas.
On note Ile point d’entrée dans l’eau de Mitch.
4. Montrer qualitativement qu’il existe une trajectoire optimale pour sauver le baigneur.
5. Exprimer la durée du sauvetage en fonction de la coordonnée xdu point I. En déduire une relation
permettant de calculer la coordonnée xdu sauvetage le plus rapide possible.
6. Si Mitch est déjà au bord de l’eau, combien de temps doit-il longer la plage avant de plonger ?
4.1.3 Ellipse et tire-bouchon
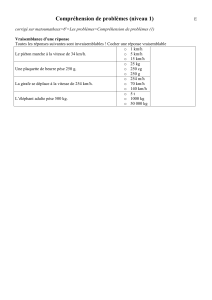
Un point matériel Mse déplace sur une ellipse plane et on repère sa position dans une base cartésienne
(O, x, y). Ces coordonnées s’expriment dans cette base selon
(x(t) = Acos (ωt)
y(t) = Bsin (ωt +ψ)
On donne le schéma ci-dessous :
2/3C. Cayssiols, 2012 – 2021

4. Cinématique des corps ponctuels 4.1. Problèmes de khôlle
x
y
•
M
•
M0
θ
a
b
1. À t= 0, le point matériel est en M0. En déduire Aet ψ.
2. Déduire des autres données l’expression de Bpuis la trajectoire du point M.
3. Déterminer les composantes des vecteurs vitesse #”
vet accélération #”
adu point Mdans la base
cartésienne.
4. Montrer alors que #”
a=−k
# ”
OM en précisant l’expression de k.
Le point matériel Mdécrit à présent une hélice circulaire d’axe Oz , son mouvement étant défini en
coordonnées cylindriques dans la base de projection (O, r, θ, z)par les équations :
r=R
θ=ωt
z=H1−θ
2π
où R,ω, et Hsont des constantes positives.
5. Où se trouve le point Mà l’instant t= 0 ?
6. Exprimer la vitesse #”
vdu mobile, dans la base associée aux coordonnées cylindriques. Préciser son
module et son orientation.
7. Exprimer l’accélération #”
adu mobile, dans la base associée aux coordonnées cylindriques. Que
peut-on dire du produit scalaire #”
a·#”
v?
3/3C. Cayssiols, 2012 – 2021
1
/
3
100%