CH11 Redressement commandé
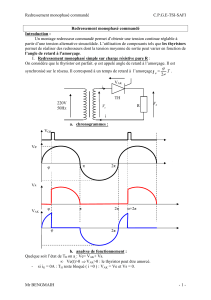
1. Le thyristor
1.1 Symbole
A K
i Cathode
Anode Th iG
uTh G
Une borne supplémentaire : la gâchette G utilisée pour la commande du
composant à l’aide du courant iG.
uTh = vA–vK
Si uTh > 0 : tension directe; si uTh < 0 : tension inverse.
1.2 Fonctionnement, modèle

Amorçage d’un thyristor
Si uTh > 0 et iGsuffisamment intense( mais négligeable devant i ), le thyristor
s’amorce. Il conduit. Il se comporte comme une diode.
Si uTh > 0 et iG= 0 , il reste bloqué.
Si UTh < 0, on ne peut rendre le thyristor conducteur.
Blocage du thyristor
* Un thyristor passant se bloque lorsque i s’annule : on parle d’extinction
naturelle.
* On le bloque par une mise sous tension inverse : c’est le blocage forcé.

Modèle :
Thyristor bloqué : interrupteur ouvert. Thyristor passant : Interrupteur fermé
A K A K
1.3 Retard à l’amorçage
Une diode s’amorce naturellement aux instants 0, T, 2T, … c-à-d au moment
où la tension uDdevient positive.
Le décalage d’amorçage par rapport à ces instants grâce à iGpour un thyristor
est un retard à l’amorçage t0.
On appelle angle de retard à l’amorçage, l’angle α= ωt0.
Exemple : u = 24 sin ( ωt ) ; f = 50 Hz donc ω= 314 rad/s.
Si t0= 2 ms, ωt0= 314 x 0,002 = 0,628 rad soit un angle de retard à
l’amorçage égale à 36°.
2

1.4 Groupement de thyristors
Dans un groupement de thyristors àcathodes ou àanodes communes, la
conduction d’un thyristor impose le blocage des autres thyristors.
2. Montage redresseur àdeux thyristors avec transformateur àpoint
milieu Charge résistive
A1Th1
Réseau v1uc
50 Hz ic K
v2Rc
A2Th2
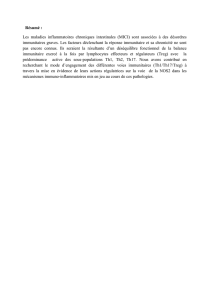
V1 = Vmaxsin( ωt ) ; v2 = Vmaxsin( ωt + π)

v v1v2
Vmax v1v2
T/2 T t ( en ms )
0 π2π θ( en rad )
-Vmax
iG1
t0t0+ T t
t0+ T/2
uc
α α+ π
Th1 Th2 Th1
Charge résistive : ic et uc ont la même forme ic =
uc
Rc
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%